

3.10. Математическое описание процессов электромеханического
преобразования энергии в асинхронном двигателе
Схема
включения трехфазного асинхронного
двигателя с фазным ротором показана
на рис. 3.26, а,
соответствующая ей двухфазная модель
представлена на рис. 3.26, б.
Математическое описание процессов
электромеханического преобразования
энергии наиболее удобно получить в
синхронных осях х,
у,
при этом, как было показано в гл. 2,
синусоидально изменяющиеся реальные
переменные машины преобразуются в
постоянные величины, характеризующие
проекции изображающего вектора на
синхронно с ним вращающиеся
координатные оси х
и у.
Наиболее компактной записью уравнений
механической характеристики является
комплексная форма. В осях х,
у
![]() эти уравнения можно получить с
помощью (2.27), положив
эти уравнения можно получить с
помощью (2.27), положив![]() :
:
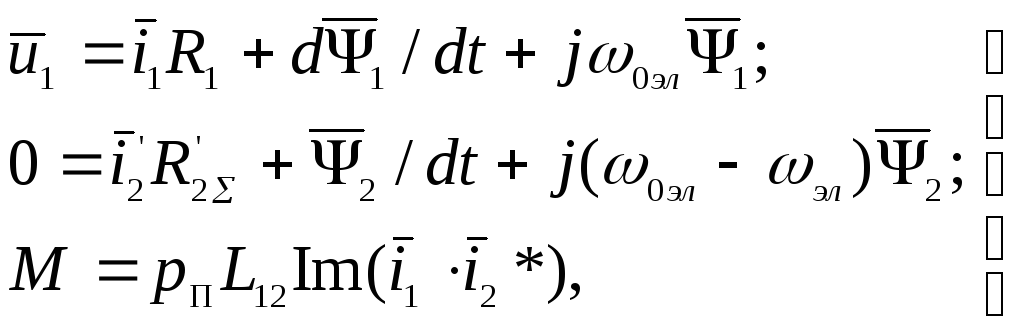 (3.64)
(3.64)
где
![]() — суммарное активное сопротивление
фазы двигателя.
— суммарное активное сопротивление
фазы двигателя.
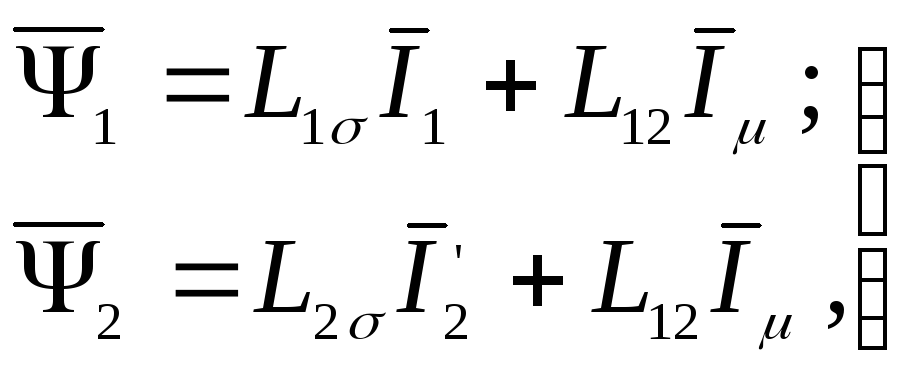
Уравнения потокосцеплений:
![]() (3.65)
(3.65)
С помощью (3.65) можно выразить токи через потокосцепления:
![]() ;
(3.66)
;
(3.66)
![]() .
(3.67)
.
(3.67)
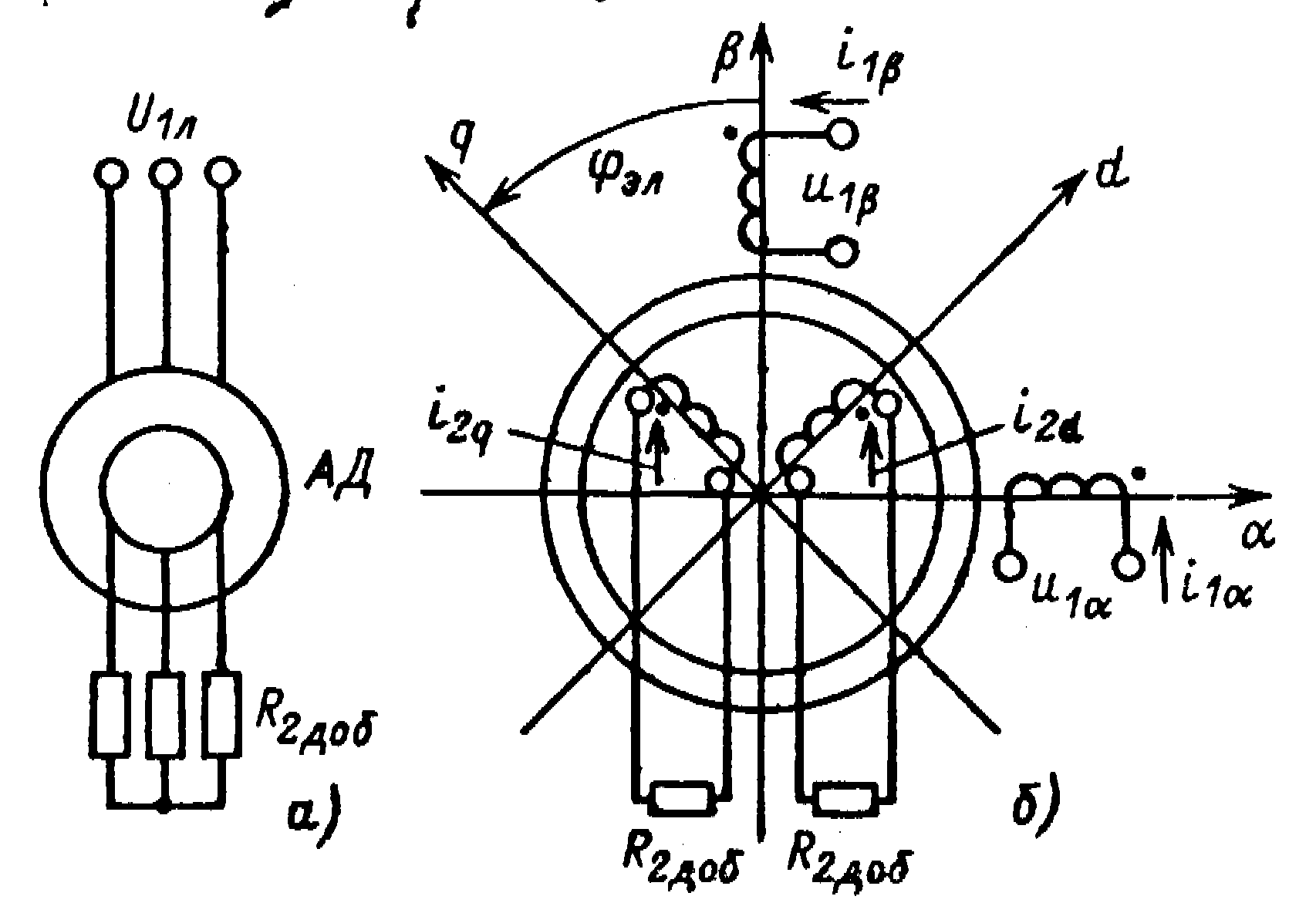
Рис. 3.26. Схемы трехфазного асинхронного двигателя (а) и его двухфазной модели (б)
Подставив (3.66) и (3.67) в (3.64), можно получить уравнения механической характеристики, выраженные через потокосцепления:
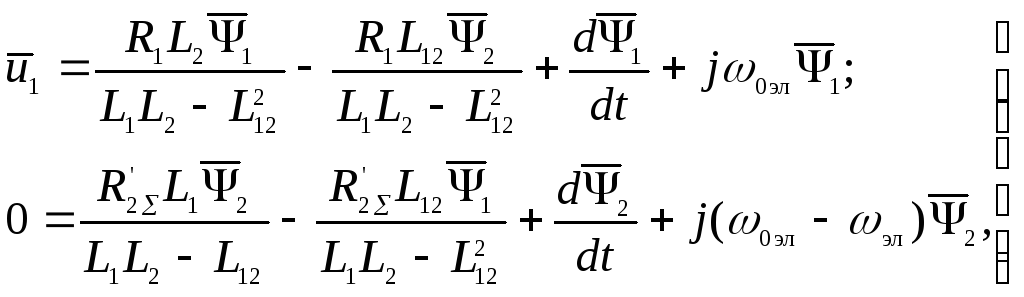
![]() (3.68)
(3.68)
Уравнения (3.64) и (3.68) используются в дальнейшем для анализа динамических свойств асинхронного электромеханического преобразователя. Для анализа статических режимов преобразования энергии используем выражение намагничивающего тока машины
![]() .
(3.69)
.
(3.69)
С учетом (3.69) уравнения потокосцеплений (3.65) могут быть представлены в виде
 (3.70)
(3.70)
где
![]() — индуктивности рассеяния статорной
и роторной обмоток.
— индуктивности рассеяния статорной
и роторной обмоток.
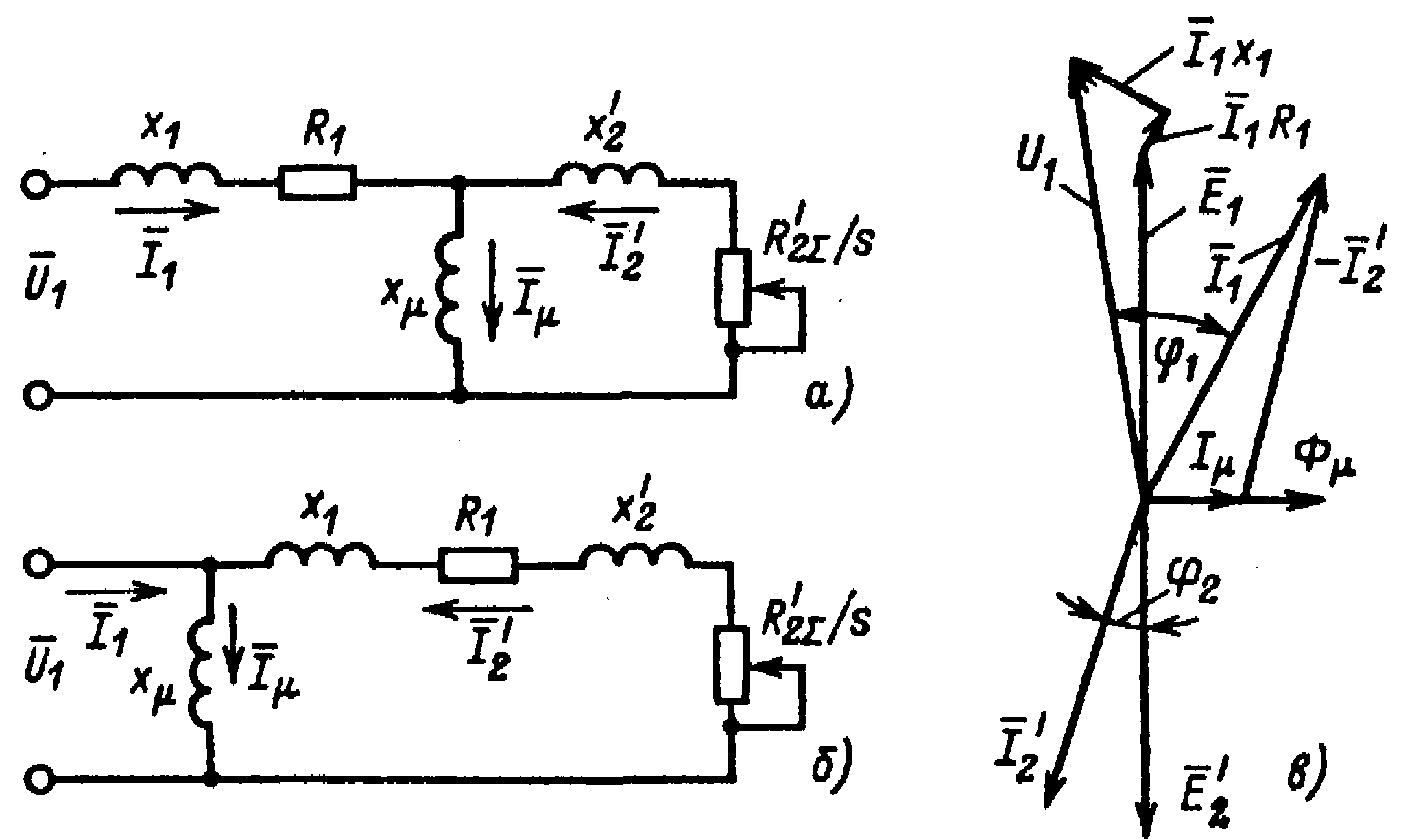
Рис. 3.27. Схемы замещения фазы (а,б) и векторная диаграмма (в) асинхронного двигателя
Приняв для статического режима в (3.64)
![]() ,
запишем первые два уравнения этой
системы так:
,
запишем первые два уравнения этой
системы так:
 (3.71)
(3.71)
где
![]()
![]() .
.
В уравнениях (3.71) величина
![]() представляет собой ЭДС фазы двигателя
представляет собой ЭДС фазы двигателя
![]() ,
,
поэтому их можно записать так:
 (3.72)
(3.72)
Уравнения (3.72) записаны для двухфазной модели двигателя. Как было показано в § 2.4, переменные двухфазной модели пропорциональны переменным реального двигателя, поэтому они являются также уравнениями электрического равновесия в комплексной форме, записанными для любой фазы реального асинхронного двигателя при его работе в статическом режиме. Им соответствуют схемы замещения фазы и векторная диаграмма, представленные на рис. 3.27.
Таким образом, математический аппарат обобщенной машины позволяет достаточно просто, как частный случай получить традиционные уравнения электрического равновесия, схему замещения и векторную диаграмму для статических режимов работы, известные из курса электрических машин.
Без большой погрешности намагничивающую
ветвь схемы рис. 3.27, аможно вынести
на выводы напряжения сети; соответствующая
этому допущению схема замещения фазы
асинхронного двигателя представлена
на рис. 3.27,б. Ошибка, вносимая этим
допущением, невелика потому, что в схеме
рис. 3.27,бне учитывается лишь влияние
падения напряжения на сопротивлениях
обмотки статора от намагничивающего
тока
![]() на определяемый схемой ток ротора.
Следует иметь в виду, что эта схема
не дает правильных представлений о
зависимости намагничивающего тока от
нагрузки двигателя, так как определяет
неизменное значение этого тока
на определяемый схемой ток ротора.
Следует иметь в виду, что эта схема
не дает правильных представлений о
зависимости намагничивающего тока от
нагрузки двигателя, так как определяет
неизменное значение этого тока
![]() .
.