

3.16. Шаговый режим работы синхронного электромеханического преобразователя
Важной особенностью синхронного двигателя является возможность фиксации положения его ротора путем подключения обмоток фаз статора к источнику постоянного напряжения. Для анализа этой возможности удобно использовать схему модели синхронного двигателя, приведенную на рис. 3.46,6, приняв, что обмотка статора по оси αподключена к источнику напряжения U1Пи в ней протекает постоянный токi1α=I1П, а обмотка 1βотключена иi1β=0. Создаваемое обмоткой 1αполе статора направлено по оси α(ωэл=0,φ0ЭЛ=0), и в результате взаимодействия с ним возбужденного ротора возникает синхронизирующий момент. Определим зависимость синхронизирующего момента от угла поворота ротора с помощью последнего уравнения системы (3.114):
![]() (3.125)
(3.125)
Так как в осях α, βi1α=I1П; i1β=0, то преобразованные к осямd, qс помощью формул (2.15) токи статора имеют значения:
![]()
Потокосцепления обмоток статора
Подставив выражения токов и потокосцеплений в (3.125),
![]() (3.126)
(3.126)
Режим фиксации представлен на рис. 3.51 зависимостями Μот φЭЛ,соответствующими участку, где0эл=0. На рисунке также показаны значения токов i1α=I1П; i1β=0, а также определяемая по (3.126) зависимость синхронизирующего моментаΜ=f(φЭЛ)(кривая 1).Если при этих условиях отклонить ротор от точки φЭЛ=0 в любую сторону, возникнет момент М, направленный в соответствии с (3.126) противоположно перемещению, т< е. стремящийся возвратить систему в исходное состояние. Таким образом, при возбуждении статора постоянным током ротор синхронного двигателя фиксируется в положение, определяемое направлением результирующего вектора тока статора, с точностью, зависящей от нагрузки на валу и от электромагнитной жесткости угловой характеристики (3.126) сЭМ.
Примем, что МС== 0 и в статическом режиме ротор занимает положение, соответствующее φЭЛ=0. Если в этом положении, как показано на рис. 3.51, отключить обмотку 1α и включить на напряжениеU1Побмотку 1β,результирующий вектор I1скачком повернется на угол ΔШ=90°, значение (0элизменится и станет равным ΔφШ,при этом возникнет синхронизирующий момент, определяемый кривой 2, который будет стремиться вновь совместить ось ротора с вектором поля статора и вызывать поворот ротора в сторону новой точки фиксации. Зависимость Μ=f(эл) для участка, где0эл=ΔШ, показана на рис. 3.51 (кривая 2). Кривая 2 определяется (3.126) при подстановке вместо φЭЛугла0ЭЛ-ЭЛ=ΔШ—ЭЛ.
Рассматривая рис. 3.51, можно видеть, что указанное переключение обмоток определяет поворот ротора на один шаг ΔШ.Отключением обмотки 1βи включением обмотки 1α на напряжение —U1Пвектор поля статора скачком поворачи-

Рис.3.51. К пояснению работы шагового двигателя
вается еще на одни шаг, ротор занимает положениеэл= 2ши т.д. Таким путем можно задавать дискретные перемещения ротора двигателя, соответствующие определенному числу шагов. Средняя скорость перемещения при этом определится частотой импульсов тока, подаваемых в обмотки статора:
ср = 0ср = ш /tш= f1ш (3.127)
Кривая М = f(эл)на рис. 3.51свидетельствует о том, что среднее по пройденному пути значение электромагнитного момента меньше, чем максимум момента по угловой характеристике, и зависит от угла, при котором осуществляется коммутация токов. Наибольшее значение среднего момента соответствует коммутации в точках пересечения кривых 1—8, обозначенныхa1—a8, при этом сре.ч.ний за один шаг момент определяется соотношением
Мсрmax= (2Мmax m/)sin(/2m),(3.128)
где m —число фаз двигателя.
Средний момент во времени может несколько отличаться от (3.128)в сторону уменьшения в связи с пульсациями скорости ротора. При f1 = constстатическая механическая характеристика в шаговом режиме при малых значенияхf1имеет вид, показанный на рис. 3.52,a(1).
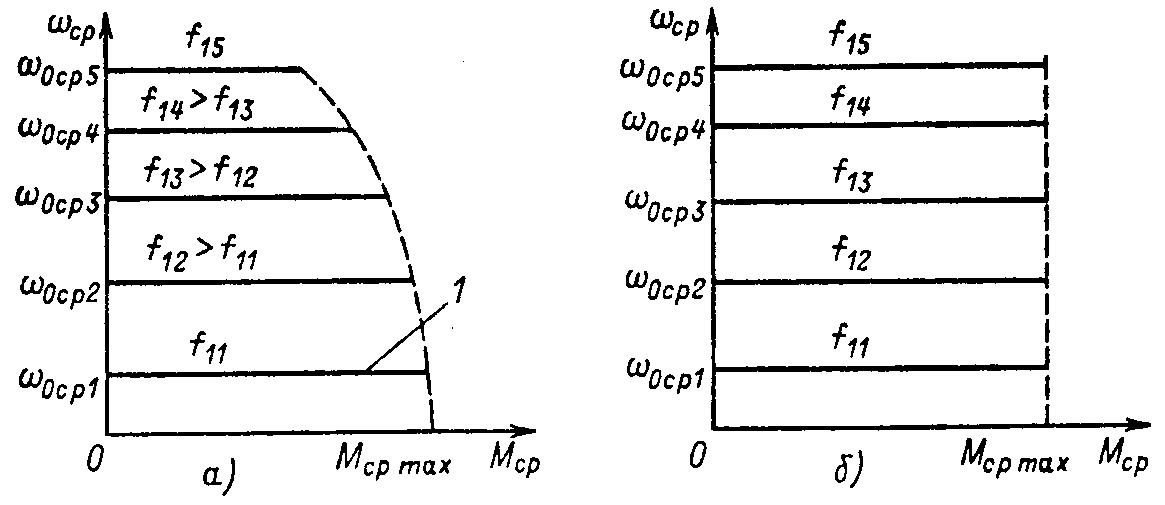
Рис. 3.52. Механические характеристики синхронного двигателя в шаговом режиме.
Следовательно, в шаговом режиме при постоянной частоте f1статическая механическая характеристика двигателя подобна рассмотренной выше для случая питания двигателя от сети. Отличием шагового режима является дискретный характер вращения вектора поля статора. Это наглядно показывают зависимость0эл= f(эл) на рис. 3.51и приведенные там же диаграммы, характеризующие дискретные положения вектора тока статора. Ступенчатая зависимость0эл= f(эл) определяет пульсации скорости ротора и снижение перегрузочной способности двигателя, определяемой (3.128).
Проведенный анализ работы синхронного двигателя в шаговом режиме при питании обмоток статора от источника напряжения справедлив только для небольших частот коммутации токов. При изменении частоты в широких пределах для строгого описания механической характеристики двигателя следует использовать систему уравнений (3.114)в записи для шагового режима:
-U1пsin(0эл-эл) = R1i1q+ d1q/dt +эл1d;
u2d= Rвiв+ dв/dt;
М = pп(1di1q -1qi1d).
Особенностью (3.123)является ступенчатый характер изменения0ЭЛ(t). Необходимость решения системы для каждого шага двигателя усложняет задачу, поэтому анализ динамики шагового режима обычно осуществляется с помощью ЭВМ.
В более широком диапазоне частот проведенный с помощью(3.126)анализ справедлив для шагового режима при питании всех обмоток двигателя от источников тока. В этом случае Iв =const, токи статора имеют форму, близкую к показанной на рис. 3.51,и угловая характеристика определяется (3.126)при заменеэл на0эл -эл:
М =pп [L12dIвI1пsin(0эл -эл) +
+ 0,5I21п(L1d - L1q)sin2(0эл - эл)]. (3.130)
Семейство механических характеристик, соответствующих этим условиям, представлено на рис. 3.52,б.Здесь перегрузочная способность двигателя в широком частотном диапазоне остается практически неизменной.
Таким образом, в шаговом режиме синхронный двигатель способен отрабатывать перемещения, задаваемые числом электрических импульсов, коммутирующих токи статора в требуемой последовательности. Жесткая связь между числом шагов перемещения ротора и числом электрических импульсов является замечательным свойством этого двигателя, широко используемым в практике дискретного электропривода с цифровым управлением. Для этих целей разработаны и выпускаются промышленностью серии специальных синхронных двигателей, называемыхшаговыми электродвигателями.
Шаговые электродвигатели имеют небольшую (до 4кВт) мощность и исполняются с различным числом фаз (m = 3, 4, 5...)и числом пар полюсов рп > 2. От этих параметров зависит значение шага:
ш =/mpп.(3.131)
Значение шага определяет точность
отработки перемещений при показанном
на рис. 3.51способе коммутации
токов, На практике используются более
сложные законы дискретного управления
токами фаз статора, которые позволяют
получать ряд промежуточных положений
вектора
![]() ,
т. е. дробить шаг(3.125)на
более мелкие дискреты и увеличивать
точность управления движением
электропривода.
,
т. е. дробить шаг(3.125)на
более мелкие дискреты и увеличивать
точность управления движением
электропривода.
Конструктивно шаговые двигатели имеют ряд исполнений по способу возбуждения (возбуждение ротора постоянным током, возбуждение с помощью постоянных магнитов, реактивные двигатели с Iв = 0)и по характеру движения (двигатели с вращательным движением ротора, двигатели с линейным движением ротора, двигатели с многокоординатным линейным движением ротора).
Схема модели синхронного двигателя на рис. 3.46,бпри соответствующем законе коммутации токов обмоток статора полностью соответствует реальным шаговым двигателям различного исполнения. Поэтому проведенный анализ шагового режима работы отражает особенности шаговых двигателей. В частности, показанные на рис. 3.51зависимости наиболее близко соответствуют шаговым двигателям с питанием обмоток статора от источников тока и постоянными магнитами на роторе при рассмотренном законе импульсного возбуждения статора (без дробления шага).