

7.3. Схемы шунтирования якоря двигателя постоянного тока с независимым возбуждением
Наиболее благоприятные условия регулирования скорости двигателя с независимым возбуждением обеспечиваются изменением подведенного к якорной цепи напряжения Uя. Для автоматического регулирования скорости предусматривается питание якорной цепи от индивидуального управляемого преобразователя (системы Г-Д и ТП-Д). Однако при невысоких требованиях к точности и плавности регулирования в промышленных электроприводах используются резисторные схемы включения, получившие названиесхем шун-тирования якоря.
Потенциометрическая схема регулирования скорости двигателей с независимым возбуждением приведена на рис. 7.4, а. При двигателе небольшой мощности потенциометр может быть выполнен в виде реостата с подвижным контактом, путем перемещения которого подведенное к двигателю напряжение можно изменять от 0 доUя =Uном. Электромеханическая и механическая характеристики двигателя в этой схеме могут быть получены по аналогии с системой УП-Д, если рассматривать потенциометр как источник регулируемого напряжения с внутренней ЭДС, равной напряжению холостого хода:
 (7.13)
(7.13)
и внутренним сопротивлением
![]() (7.14)
(7.14)
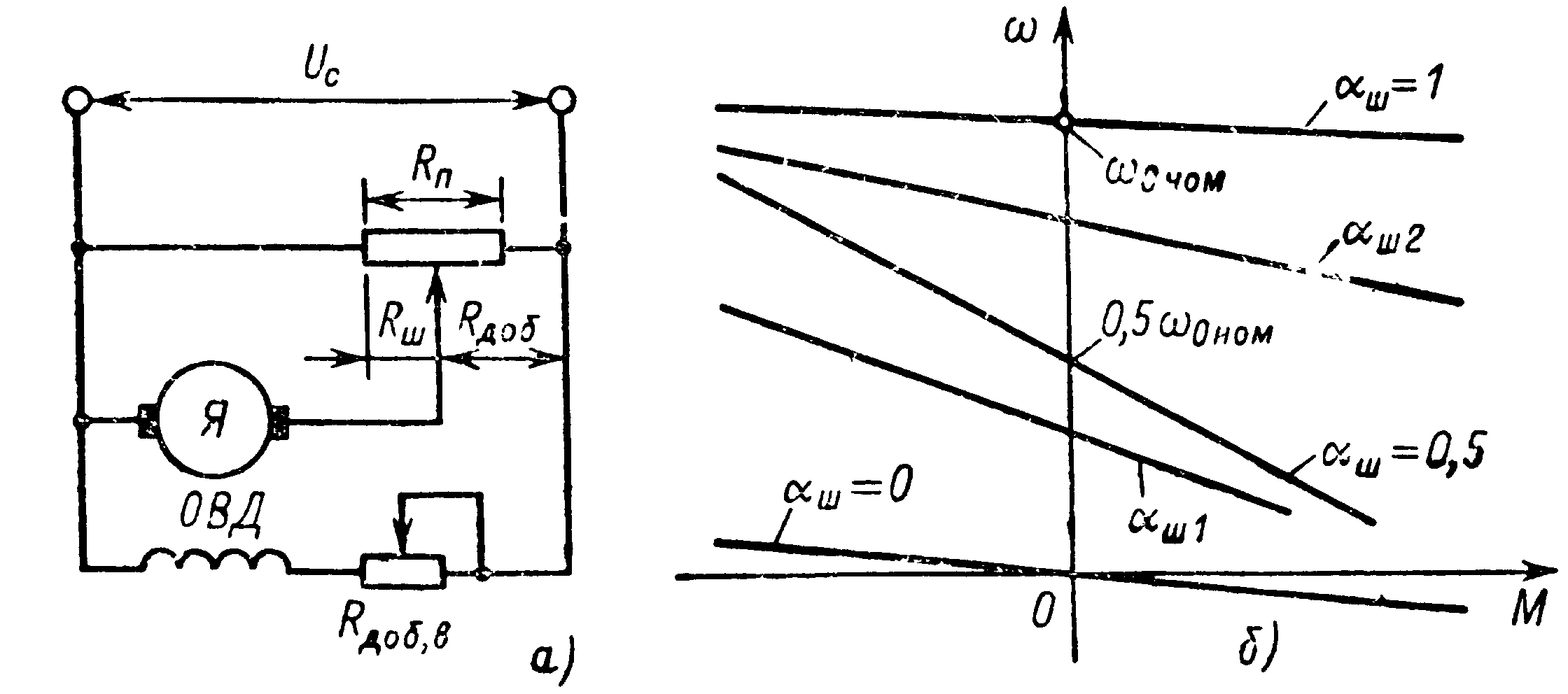
Рис.7.4. Регулирование скорости двигателя с независимым возбуждением в потенциометрической схеме
Подставив (7.13) и (7.14) в (5.6), получим уравнения характеристик в потенциометрической схеме в следующем виде:
 (7.15)
(7.15)
 (7.16)
(7.16)
Из (7.16) следует, что при перемещении движка потенциометра скорость идеального холостого хода уменьшается пропорционально αШ, а модуль жесткости статической характеристики
 (7.17)
(7.17)
является переменной, зависящей от αШ. При αШ=0 и αШ=1 жесткость βШравна жесткости естественной характеристики двигателя βпри питании его от бесконечно мощной сети. При промежуточных значениях αШмодуль жесткости βШ < β, причем его минимум может быть определен обычным путем. Продифференцировав знаменатель (7.17) по αШи приравняв производную нулю, нетрудно определить значение αШ= 0,5, при котором βШимеет минимум:
![]() (7.18)
(7.18)
Полученный результат позволяет построить механические характеристики двигателя в потенциометрической схеме (рис. 7.4, б).
Рассматривая (7.18), можно установить, что минимальная жесткость механической характеристики в потенциометрической схеме по модулю тем больше, чем меньше сопротивление потенциометра Rп, т. е. чем больше его мощность.
Так как при регулировании поток двигателя остается постоянным (Ф=Фном), допустимая нагрузка двигателя без учета изменения условий охлаждения постоянна: Μ=Мном=const. При такой нагрузке двигателя мощность потенциометра превышает номинальную мощность двигателя, так как определяется напряжением сети Uном и наибольшим током потенциометра:IП.MAX=Iном+IШ.МАХ>Iном. Наибольший ток шунтирующей части потенциометраIШ.МАХбыстро увеличивается при уменьшенииRп, поэтому минимальная жесткость механических характеристик в рассматриваемой схеме ограничивается приемлемой мощностью потенциометра. Тем самым ограничивается и возможный при данных пределах изменения нагрузки и требуемой точности диапазон регулирования скорости.
Плавность регулирования при небольшой мощности двигателя, позволяющей использовать ползунковый реостат, получается достаточно высокой. Однако с возрастанием мощности двигателя эта возможность исключается и регулирование осуществляется переключением ступеней регулировочных сопротивлений RШиRдоб с помощью силовой коммутирующей аппаратуры.
При таком регулировании принимать суммарное сопротивление потенциометра RП=Rш +Rдоб постоянным нецелесообразно, так как сопротивленияRШиRдоб могут регулироваться независимо. Для этого случая (7.15) и (7.16) удобно представить в виде
 (7.19)
(7.19)
 (7.20)
(7.20)
Следует иметь в виду, как изменяются характеристики двигателя при изменении Rш при неизменномRдоб или наоборот. Примем сначалаRдоб=constи будем изменять в (7.19)RШ(αШ).
При изменении сопротивления шунтирующего резистора от бесконечности до нуля скорость идеального холостого хода непрерывно уменьшается от ω0номдо 0, а жесткость возрастает от βШ=c2/(RЯ+Rдоб) до βш = β.Все эти характеристики пересекаются в одной точке, в которой ток якоря двигателя имеет значение
 (7.21)
(7.21)
при скорости в режиме противовключения
![]() (7.22)
(7.22)
Это можно установить, определив напряжение на выводах якоря двигателя при Iя = IK1и ω = ωK1:
![]() (7.23)
(7.23)
Подставляя (7.22) в (7.23), убеждаемся, что в этой точке на выводах якоря напряжение равно нулю, так как ЭДС двигателя, работающего в генераторном режиме, равна падению напряжения на сопротивлении якоря. При любом сопротивлении RШтокIШв этой точке равен нулю, поэтому она является общей для всего рассматриваемого семейства характеристик (рис. 7.5, а).
Аналогичная общая точка обнаруживается и в семействе характеристик, соответствующем RШ=constиRДОБ=var (рис. 7.5, б).
Все эти характеристики пересекаются в точке, где ток якоря определяется соотношением
![]()
а скорость имеет значение
![]()
В этой точке напряжение на выводах двигателя равно напряжению сети, поэтому ток из сети не потребляется и значение Rд не сказывается на условиях работы двигателя. Графически точкаIK1, ωК1определяется пересечением реостатной характеристики приRЯΣ=RЯ +Rдоб(Rш =∞) и естественной характеристики динамического торможения (Rш = 0) (прямые1 и 2на рис. 7.5,а).
Точка IК2и ωК2определяется пересечением естественной характеристики двигателя3 (RДОБ=0) и реостатной характеристики динамического торможения4 (RДОБ =∞), как показано на рис. 7.5,б.
Таким образом, механические характеристики в схеме шунтирования якоря двигателя с независимым возбуждением являются характеристиками двигателя, питаемого от источника регулируемого напряжения с относительно большим и изменяющимся при регулировании напряжения внутренним сопротивлением.
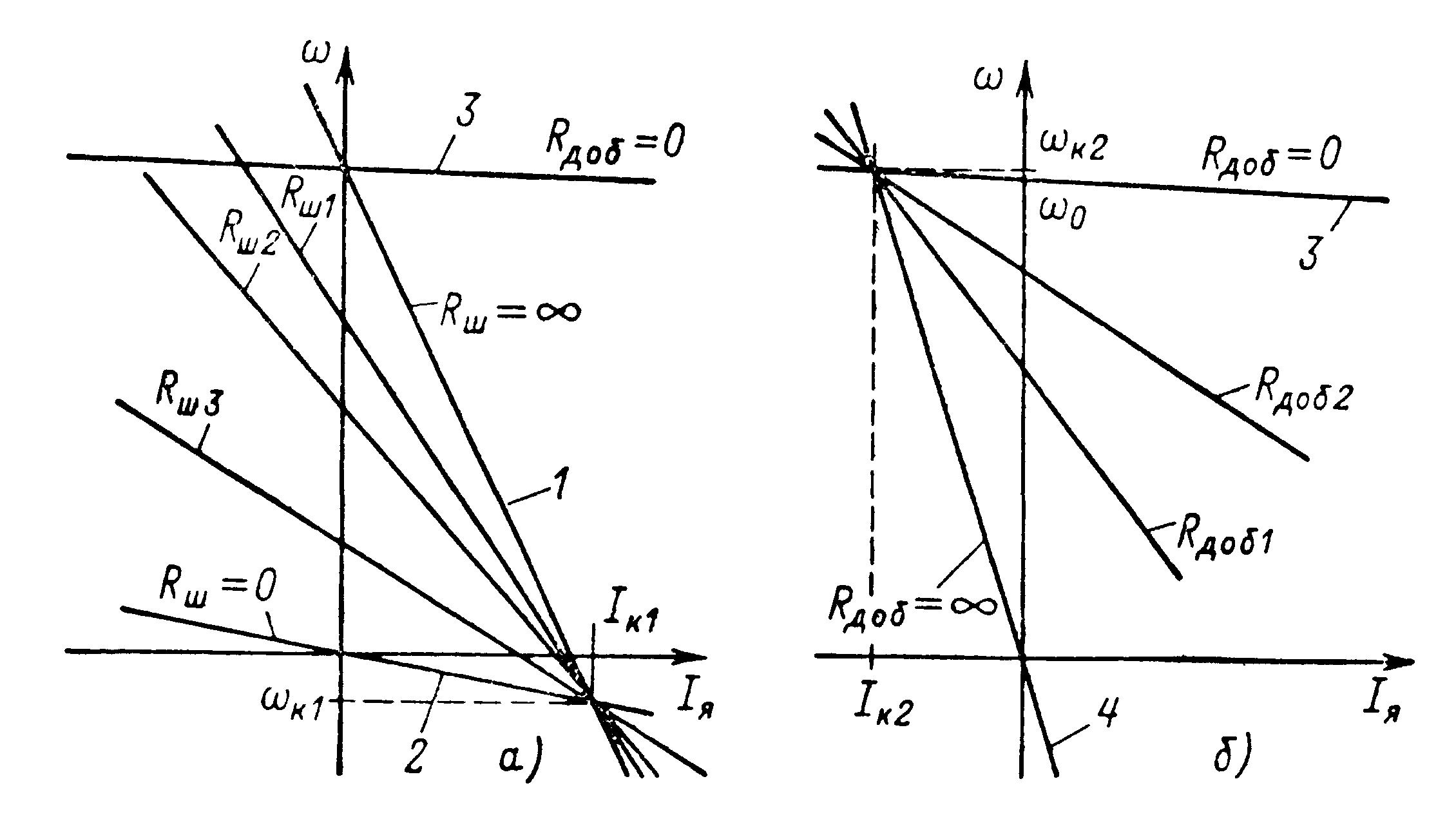
Рис 7.5. Характеристики в схеме шунтнрования якоря двигателя с независимым возбуждением при Rдоб=const,RШ=var (а) и приRШ=const,Rдоб=var (б)