

7.13. Каскады с однозонным регулированием скорости
Рассмотрим особенности перечисленных упрощенных каскадных схем, которые в связи с развитием полупроводниковой техники получили широкое распространение. Схема электрического машинно-вентильного каскада представлена на рис. 7.40,а. Здесь в цепь ротора включен мостовой полупроводниковый выпрямитель В,к выводам которого через
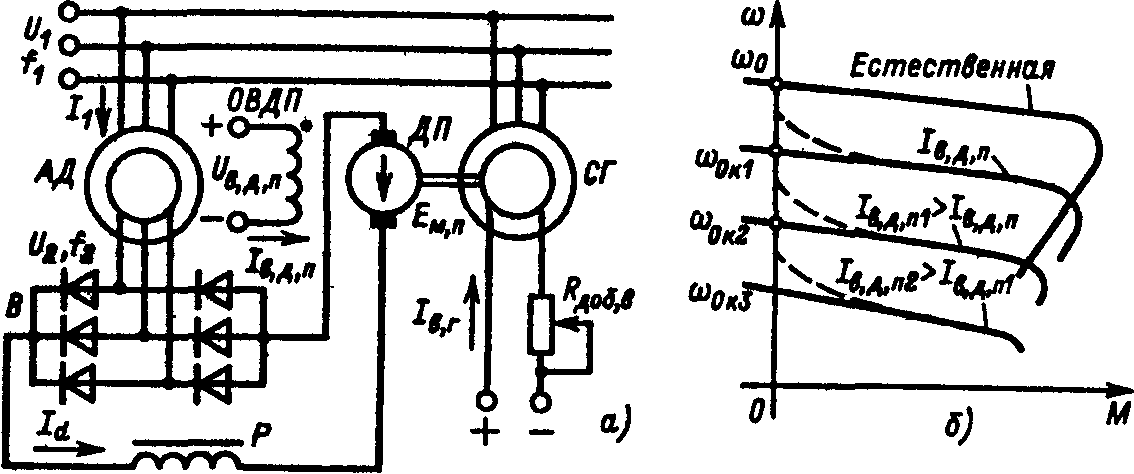
Рис.7.40. Схема (в) и механические характеристики(б)машинно-вентильного электрического каскада
сглаживающий реактор Рподключен якорь двигателя постоянного токаДП.Этот двигатель приводит во вращение синхронный генераторСГ,ток возбуждения которого можно регулировать вручную с помощью реостатаRдоб,в. В более общем случае регулирование тока возбуждения может быть автоматическим и осуществляться с помощью предусмотренного для этой цели тиристорного возбудителя.
Наличие неуправляемого выпрямителя в цепи ротора существенно изменяет свойства каскада по сравнению с рассмотренным каскадом с режимом МДП. Здесь частота и напряжение роторной цепи определяются скоростью ротора двигателя, его скольжением, поэтому синхронный режим работы исключен — каскад всегда работает в асинхронном режиме. Односторонняя проводимость цепи якоря ДП,обусловленная наличием вентилей, исключает возможность изменения направления потока энергии скольжения - машинаДПработает двигателем,СГ —генератором, т. е. поток энергии скольжения всегда направлен от ротора двигателя в сеть.
Выпрямитель Вработает на противо-ЭДС двигателя ДП, которой можно задавать любые значения в диапазоне0-Ед,п,ном, изменяя напряжениеUв,д,пи ток возбужденияIв,д,пмашиныДП. Следовательно, управление потоком мощности скольжения здесь осуществляется в цепи выпрямленного тока. При этом, как было отмечено в § 6.2, для получения механической характеристики каскада целесообразно использовать схему замещения, приведенную к цепи выпрямленного тока.
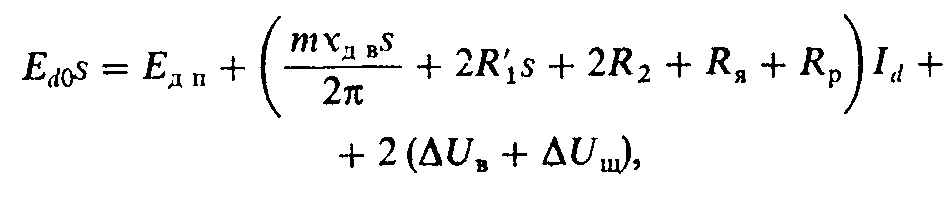
Для рассматриваемого каскада такая схема представлена на рис. 7.41. С ее помощью можно записать уравнение электрического равновесия:
 (7.121)
(7.121)
где Ед,п- ЭДС двигателя постоянного токаДП; Еd0 -среднее значение выпрямленного напряжения приs =1 иId= 0;Uв
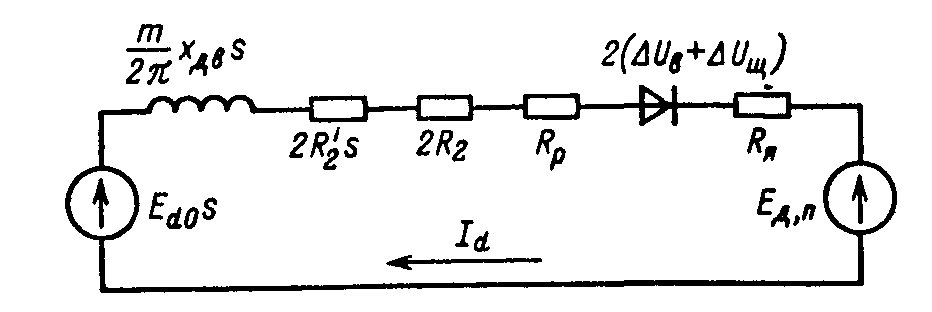
Рис. 7.41. Схема замещения цепи выпрямленного тока
и Uщ— падение напряжения на одном вентиле и одной щетке на якоре двигателяДПпри протекании выпрямленного токаId; xдв= х’1 + x2 —реактивные сопротивления рассеянияАД,приведенные ко вторичной цепи;R’1 -активное сопротивление статорной обмоткиАД,приведенное к цепи ротора;R2- сопротивление фазы ротораАД; mxдвs/2 -сопротивление, учитывающее падение напряжения, обусловленное процессами коммутации токов. На схеме оно условно изображено в виде реактивного сопротивления, так как не связано с поглощением энергии.
Из (7.121) определим выпрямленный ток ротора:
![]() (7.122)
(7.122)
где E
= Ед,п + 2 (Uв
+ Uщ)
= f(Iв,д,п)- суммарная противо-ЭДС в цепи постоянного
тока с учетом падения напряжения на
вентилях и щетках якоря двигателя;![]() ;Rя-сопротивление реактора Р.
;Rя-сопротивление реактора Р.
Уравнение (7.122) показывает, что при Е0 ток роторной цепи становится равным нулю при конечном значенииs=s0 оответствующем режиму идеального холостого хода привода:
![]() (7.123)
(7.123)
Следовательно, воздействием на цепь возбуждения ДП можно изменять скорость идеального холостого хода на искусственной характеристике:
 (7.124)
(7.124)
Из данного выражения следует, что при
увеличении тока возбуждения Iв,д,ппотокФд,пи ЭДСЕд,пвозрастают, что влечет за собой снижение
скорости идеального холостого хода
привода. При Фд,п= 0![]() 0и<0из-за
падения напряжения на вентилях и щетках,
которое нелинейно зависит от тока и
принимается здесь примерно постоянным.
Получить в каскаде скорость идеального
холостого хода, близкую0, можно путем изменения знака ЭДСЕд,пи направления тока возбужденияIв,д,п.
ПриEмп= 2(Uв
+ Uщ)
получим0и=0. При этом
следует иметь в виду, что при изменении
знака ЭДС Ед,пи выполнении
неравенства | Ед,п| >2(Uв
+ Uщ)
якорная цепь оказывается замкнутой
вентилямиВнакоротко и ток якоря
может быстро возрастать до опасных
значений.
0и<0из-за
падения напряжения на вентилях и щетках,
которое нелинейно зависит от тока и
принимается здесь примерно постоянным.
Получить в каскаде скорость идеального
холостого хода, близкую0, можно путем изменения знака ЭДСЕд,пи направления тока возбужденияIв,д,п.
ПриEмп= 2(Uв
+ Uщ)
получим0и=0. При этом
следует иметь в виду, что при изменении
знака ЭДС Ед,пи выполнении
неравенства | Ед,п| >2(Uв
+ Uщ)
якорная цепь оказывается замкнутой
вентилямиВнакоротко и ток якоря
может быстро возрастать до опасных
значений.
Электромагнитный момент двигателя можно определить по элеюромагнитной мощности Рэ,передаваемой роторной цепи:
![]() (7.125)
(7.125)
Здесь учтено, что падение напряжения, обусловленное коммутацией, имеет реактивный характер и не связано с потреблением энергии. Выражение (7.122) с учетом (7.123) можно представить в виде
![]() (7.126)
(7.126)
Подставив (7.126) в (7.125), получим
![]() ( 7.127)
( 7.127)