

7.12. Каскадные схемы регулирования скорости асинхронного электропривода
Существенным недостатком всех рассмотренных способов регулирования скорости асинхронного двигателя при ω0=constявляется возрастание потерь энергии в роторной цепи при снижении скорости пропорционально скольжению. Однако у двигателя с фазным ротором этот недостаток может быть устранен путем включения в цепь ротора источника регулируемой ЭДС, с помощью которого энергию скольжения можно либо возвратить в сеть, либо использовать для совершения полезной работы.
Схемы асинхронного электропривода с включением в цепь ротора дополнительных ступеней преобразования энергии для использования и регулирования энергии скольжения получили название каскадных схем(каскадов). Если энергия скольжения преобразуется для возвращения в электрическую сеть, каскад называютэлектрическим.Если энергия скольжения с помощью электромеханического преобразователя преобразуется в механическую энергию и поступает па вал двигателя, то такие каскады называютсяэлектромеханическими.
Электрические каскады, в которых цепь ротора подключается к преобразователю частоты, способному как потреблять энергию скольжения, так и доставлять энергию двигателю со стороны ротора на частоте скольжения, т. е. управлять потоком энергии в цепи ротора как в прямом, так и в обратном направлении, называются каскадами с асинхронным двигателем, работающим в режиме машины двойного питания (МДП). Схема такого каскада представлена на рис. 7.38, а.
Анализ этой схемы позволяет выявить наиболее общие закономерности, свойственные электроприводам с каскадным включением асинхронных двигателей. В установившихся режимах работы любой электрической машины поля статора и ротора для создания постоянного момента должны быть взаимно неподвижны. Поэтому если в схеме рис. 7.38, а задание частоты uy,ч= constиf2не зависит от нагрузки двигателя, то скорость двигателя в пределах допустимой перегрузки остается неизменной:
![]()
Такой режим работы называется синхронным режимом МДП.Для его математического описания воспользуемся уравнениями механической
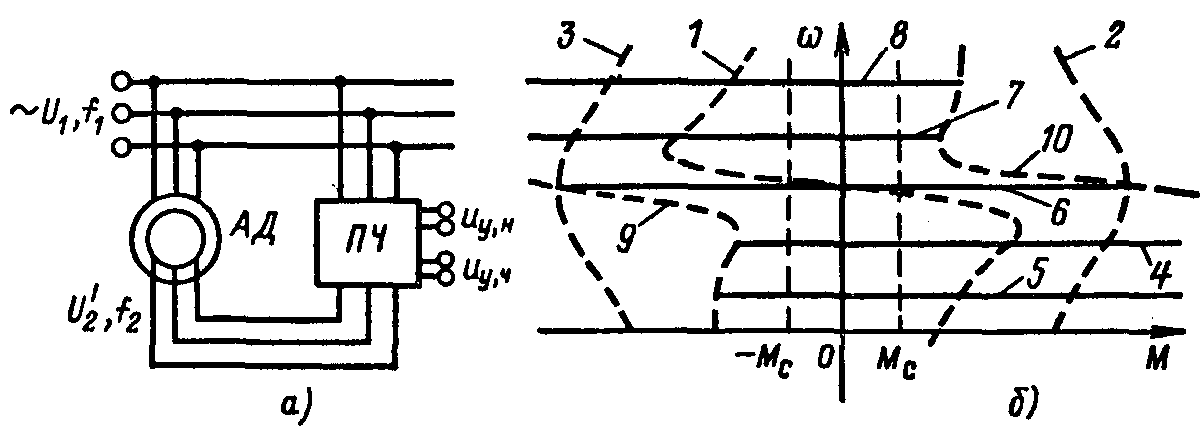
Рис.7.38. Электрический каскад с асинхронным двигателем, работающим в режиме МДП:
а-схема; б—механические характеристики при U’2= cons
характеристики
обобщенной машины в осях х, утак
как поля ротора и статора вращаются в
рассматриваемом режиме со скоростью0эл
=2f1.
При записи по аналогии с синхронной
машиной, рассмотренной в § 3.15, ориентируем
все переменные относительно вектора
напряжения![]() ,подводимого к ротору:
,подводимого к ротору:
![]() (7.109)
(7.109)
Как было установлено в § 3.15, в синхронном
режиме синхронного двигателя момент
определяется углом эл=
0эл-
элпричем ось поля ротора совпадает с
направлением вектора.В синхронном
режиме МДП ток ротора имеет частоту2эл,
которая в общем случае не равна нулю.
При этом изменения нагрузки и скольжения
вызывают изменения угла сдвига поля
ротора относительно напряжения, поэтому
вектор напряжения статора![]() сдвинут
относительно вектора
сдвинут
относительно вектора![]() на угол12эл
,который равен углуэлтолько приf2=
0, т. е. при возбуждении ротора постоянным
током. Приf2
0действительные напряжения, приложенные
к обмоткам фаз статора двигателя, можно
записать в виде
на угол12эл
,который равен углуэлтолько приf2=
0, т. е. при возбуждении ротора постоянным
током. Приf2
0действительные напряжения, приложенные
к обмоткам фаз статора двигателя, можно
записать в виде
![]() (7.110)
(7.110)
Уравнения МДП в осях х, уимеют вид
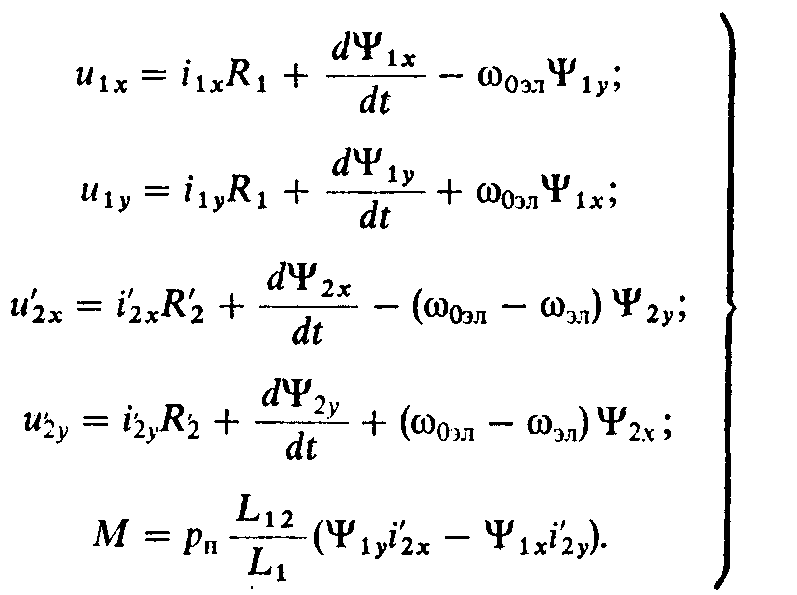 (7.111)
(7.111)
Ограничимся рассмотрением установившегося режима работы, положив d/dt= 0, и пренебрежем активным сопротивлением обмотки статораR10.Для использования (7.111) с помощью формул (2.15) и (2.16) преобразуем (7.109) и (7.110) к осямx, у (к=0эл).