

20.2 Опис лабораторної установки
Схема електрична принципова керування двигуном підйому приведена на рисунку 20.1.
Установка складається з асинхронного двигуна з фазним ротором, редуктора, дискового короткохідного гальма з електромагнітом, барабана з тросом, підвіски з одним рухливим блоком, апаратури керування і захисту.
Дані
двигуна: тип МТОІП-6,
![]() =1,4
кВт,
=1,4
кВт,
![]() =1000
об/хв,
=1000
об/хв,
![]() =380
В,
=380
В,
![]() =5,3
А,
=0,885,
cosφн=0,65.
=5,3
А,
=0,885,
cosφн=0,65.
Редуктор з циліндричними колесами (триступінчастий) із загальним передатним відношенням ір=29. Поліспаст, що складається з одного рухливого блоку, збільшує передатний коефіцієнт до і=58. Коефіцієнт корисної дії всіх передатних ланок при номінальному навантаженні =0,7. При навантаженні, близькому 25% від номінального, ККД падає до 0,5.
Радіус барабана =82,5 мм.
Керування електроприводом відбувається за допомогою контролера ККТ-61, що має одинадцять положень рукоятки. Схема включення опору у фазах двигуна симетрична, і застосовується для механізмів пересування і повороту. Але для малих кранів допускається застосовувати симетричну схему і для механізмів підйому.
Вага вантажу – 1 плита важить 90 кг, підвіска – 20 кг.
20.3 Проведення лабораторної роботи
Механічна характеристика асинхронного двигуна з фазним ротором не прямолінійна, але на ділянці робочої характеристики із синхронною швидкістю до номінального навантаження вона дуже близька до прямої і тому може бути побудована по двом точкам: синхронної швидкості і швидкості, що відповідає якому-небудь навантаженню.
Синхронна швидкість визначається по формулі:
![]() ,
,
де
![]() – кутова
швидкість, с-1;
– кутова
швидкість, с-1;
– частота мережі, 50 Гц;
p – число пар полюсів.
Другу точку визначають за показниками тахогенератора (показуючого приладу) і визначають момент на валу двигуна по формулі:
![]() ,
Н·м
,
Н·м
де – вага вантажу, Н;
– радіус барабана, м;
і – передаточне число редуктора і поліспаста;
– ККД передач.
Якщо навантаження менше номінального, то ККД розраховується чи його треба визначати по кривій.
Встановлюємо рукоятку контролера в нульове положення і вмикаємо автомат.
Переконавшись, що закріплений необхідний вантаж і дверцята опущені вниз, переводимо рукоятку контролера в перше положення “підйом”.
Фіксуємо дані при усталеному русі вантажу нагору і заносимо їх у таблицю.
Зупиняємо привод переводом рукоятки контролера в нульове положення.
Спускаємо вантаж у режимі противвімкнення чи в режимі силового чи генераторного спуску і фіксуємо дані в ту ж таблицю.
Характеристики двигуна на підйом для усіх вантажів і всіх положень рукоятки контролера, на яких можливий підйом даного вантажу.
Характеристики гальмового спуску вантажів у режимі противвімкнення можливо одержати тільки для найбільшого вантажу в перших положеннях підйому.
Силовий спуск вантажу невеликої величини (чи порожнього гака) досліджувати на всіх п’ятьох положеннях контролера ”спуска”.
Положення рукоятки контролера |
|
Швидкість |
|
|
Розрахункові дані |
||||
Діл. |
ω1, 1/с |
|
|
Мс,Нм |
Rр,Ом |
||||
1 “підйом” |
|
|
|
|
|
|
|
|
|
2 “підйом” |
|
|
|
|
|
|
|
|
|
3 “підйом” |
|
|
|
|
|
|
|
|
|
і т.д. |
|
|
|
|
|
|
|
|
|
1 “спуск” |
|
|
|
|
|
|
|
|
|
2 “спуск” |
|
|
|
|
|
|
|
|
|
3 “спуск” |
|
|
|
|
|
|
|
|
|
і т.д. |
|
|
|
|
|
|
|
|
|
Генеральний спуск вантажу одержують при досить великих вантажах на всіх положеннях “спуск”.
Якщо при підйомі вантажу чи гака спрацював контакт кінцевого включення КВВ і привод аварійно зупинився, то для повернення схеми керування в нормальний стан необхідно перевести рукоятку контролера в нульове положення (при цьому контактор Л не повинен включатися). Потім натиснути аварійну кнопку “АВ” і включити контактор Л. Не припиняючи натискання кнопки “АВ”, перевести рукоятку контролера в яке-небудь положення “спуск” і дочекатися поки кінцевик КВВ не звільниться. Після цього відразу перевести рукоятку в нульове положення і загальмувати вантаж.
 Зняти
і побудувати природну механічну
характеристику
Зняти
і побудувати природну механічну
характеристику
 при Rр=0
і G=vаr,
здійснюючи послідовний підйом і спуск
різних вантажів відповідно до даних
табл. 1.1.
при Rр=0
і G=vаr,
здійснюючи послідовний підйом і спуск
різних вантажів відповідно до даних
табл. 1.1.Зняти і побудувати ряд реостатних механічних характеристик при G=vаr і Rр= vаr, здійснюючи підйом і спуск вантажів відповідно до табл. 20.1.
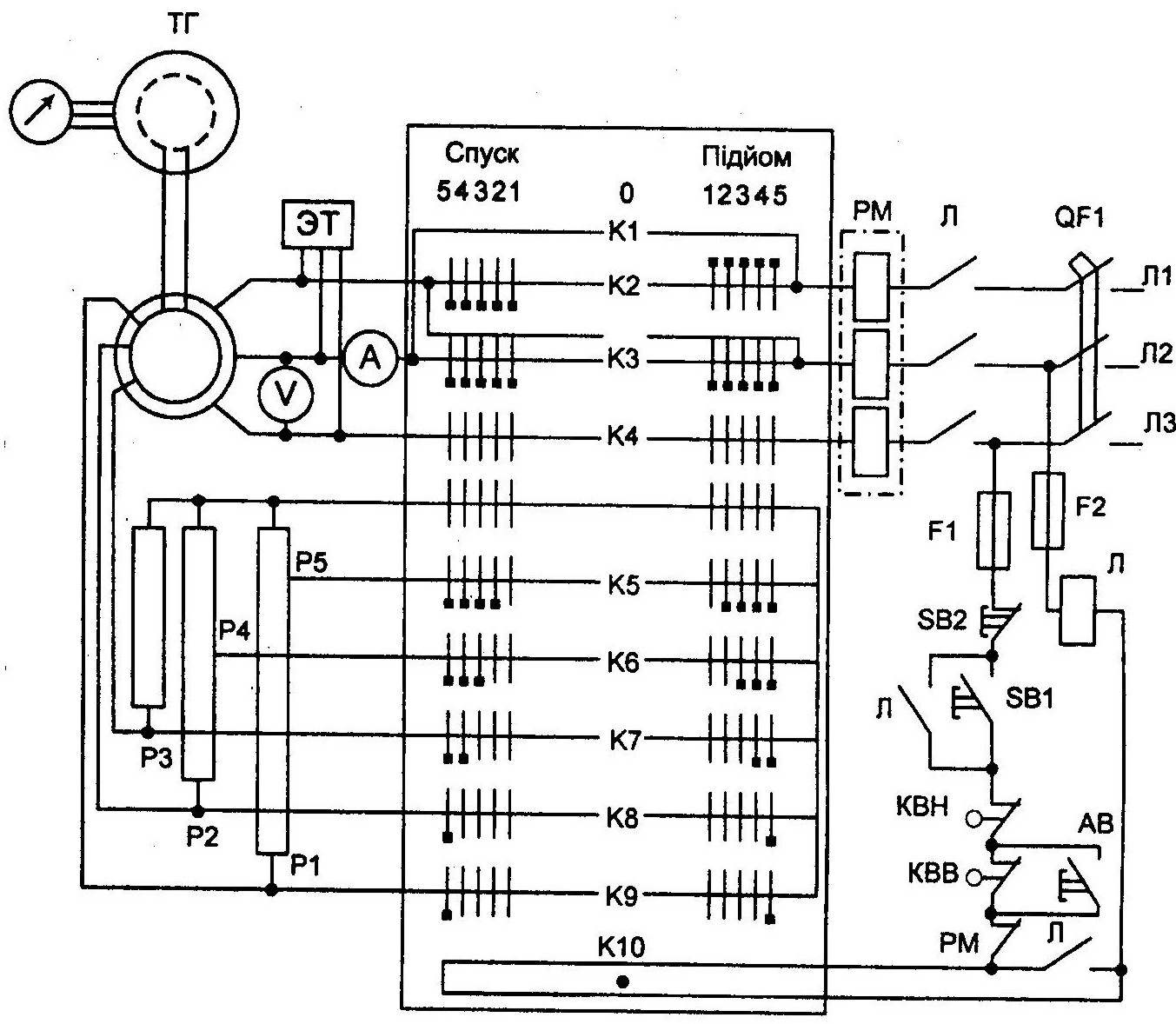
Рисунок 20.1 – Електропривод механізму підйому крана. Схема електрична принципова.
Таблиця 20.1 – Експериментальні дані.
Вага вантажу, кг
|
Швидкість обертання валу двигуна |
Розрахункові дані
|
Примітка
|
|||||||
підйом |
спуск |
|||||||||
Дел |
N, об/хв |
ω, рад/с |
Дел |
N, об/хв |
ω, рад/с |
ηн |
MИМ |
|||
5 |
20+0 20+90 20+90+90 20+90+90+90 20+90+90+90+90 |
|
|
|
|
|
|
|
|
Природна характеристика |
4 |
20+0 20+90 20+90+90 20+90+90+90 |
|
|
|
|
|
|
|
|
1-а реостатна характеристика |
3 |
20+0 20+90 20+90+90 |
|
|
|
|
|
|
|
|
2-а р.х. |
2 |
20+0 20+90 |
|
|
|
|
|
|
|
|
3-я р.х. |
1
|
20+0 |
|
|
|
|
|
|
|
|
|