

МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
Запорізький національний технічний університет
МЕТОДИЧНІ ВКАЗІВКИ
до лабораторних робіт з дисципліни
«Електропривод і системи керування ПТБД машин»
для студентів спеціальності 8.090214 усіх форм навчання
2005
Методичні вказівки до лабораторних робіт з дисципліни «Електропривод і системи керування ПТБД машин» для студентів спеціальності 8.090214 усіх форм навчання / Укл.: І.А.Андріяс, В.І.Бондаренко, Є.В.Васільєва – Запоріжжя: ЗНТУ, 2005. – 91 с.
Укладачі: |
І.А.Андріяс, доц., к.т.н. В.І.Бондаренко, доц., к.т.н. Є.В.Васільєва, ст. викладач |
Рецензент: |
В.В.Кущ, доц., к.т.н. |
Відповідальний за випуск:
|
В.І.Бондаренко, доц., к.т.н. |
|
Затверджено на засіданні кафедри ЕПА
|
|
Протокол №2 від «21» жовтня 2004
|
ЗМІСТ
Лабораторна робота №1 Дослідження електромеханічних та механічних характеристик двигуна постійного струму незалежного збудження при різних способах регулювання швидкості та режимах гальмування. |
4 |
Лабораторна робота №3 Дослідження механічних характеристик асинхронного двигуна з фазним ротором. |
20 |
Лабораторна робота №5 Регулювання швидкості та схема керування багатошвидкісного асинхронного електродвигуна. |
37 |
Лабораторна робота №6 Схема керування реверсуванням електропривода з короткозамкненим асинхронним двигуном. |
49 |
Лабораторна робота №7 Керування пуском та гальмуванням асинхронного двигуна з короткозамкненим ротором. |
55 |
Лабораторна робота №20 Дослідження механічних характеристик електропривода підйому крана на базі асинхронного електродвигуна з фазним ротором і силовим контролером. |
65 |
Лабораторна робота №23 Частотно-регульований асинхронний електропривод. |
74 |
Перелік посилань Додаткова література |
90 91 |
ЛАБОРАТОРНА РОБОТА №1
Дослідження електромеханічних та механічних характеристик двигуна постійного струму незалежного збудження при різних способах регулювання швидкості та режимах
гальмування
Мета роботи: вивчити фізичні процеси і властивості двигуна змінного струму незалежного збудження; дослідити режими роботи двигуна, а також способи регулювання швидкості та гальмування шляхом формального аналізу рівнянь електромеханічної й механічної характеристик при різних умовах; експериментально дослідити режими роботи двигуна та побудувати його характеристики; виконати аналіз експериментальних та розрахункових даних.
1.1 Основні теоретичні положення
Властивості двигуна постійного струму незалежного збудження (ДПС НЗ) виражаються його електромеханічною та механічною характеристиками.
Електромеханічна характеристика ДПС НЗ визначає залежність кутової швидкості ω двигуна від струму його якірного кола Ія, у зв’язку з чим її ще називають швидкісною:
![]() (1.1)
(1.1)
де
U
– напруга
джерела, В;
![]() –
конструктивний
коефіцієнт,
який враховує
особливості
конструкції двигуна та визначає величину
його ЕРС:
–
конструктивний
коефіцієнт,
який враховує
особливості
конструкції двигуна та визначає величину
його ЕРС:
![]()
![]() –
магнітний
потік, Вб;
–
магнітний
потік, Вб;
![]() – сумарний опір, який складається
з опору обмотки
якоря Rя
та додаткового опору зовнішнього
реостата Rдод,
Ом;
Iя
– струм в якірному колі двигуна, А.
– сумарний опір, який складається
з опору обмотки
якоря Rя
та додаткового опору зовнішнього
реостата Rдод,
Ом;
Iя
– струм в якірному колі двигуна, А.
Механічна
характеристика ДПС НЗ визначає залежність
кутової швидкості двигуна
від його обертаючого електромагнітного
моменту
![]()
![]() ,
(1.2)
,
(1.2)
де
М
– електромагнітний момент двигуна,
Н·м;
![]() – конструктивний коефіцієнт.
– конструктивний коефіцієнт.
Аналітичне вираження для механічної характеристики ДПС НЗ може бути отримане з рівняння (1.1) підстановкою Ія=М/СМФ, визначеного з (1.2). Після підстановки отримаємо:
![]() .
(1.3)
.
(1.3)
Перша
складова у рівняннях (1.1) та (1.3) визначає
швидкість ідеального
неробочого ходу ДПС НЗ, рад/с. Якщо
прийняти незмінними підведені
до двигуна напругу та її магнітний
потік Ф, швидкість ідеального
неробочого ходу машини в (1.1), (1.3) також
буде постійною величиною
![]() .
Припустимо,
що друга складова рівняння
(1.1) Rяк
та Ф незмінні, позначимо
.
Припустимо,
що друга складова рівняння
(1.1) Rяк
та Ф незмінні, позначимо
![]() тоді
отримаємо
новий
вигляд рівняння електромеханічної
характеристики ДПС НЗ:
тоді
отримаємо
новий
вигляд рівняння електромеханічної
характеристики ДПС НЗ:
![]() (1.4)
(1.4)
Можна побачити, що для умов U=const, Ф=const, Rяк=const величини А та В є сталі. Можна стверджувати, що рівняння (1.1) та (1.4) графічно відображаються прямою лінією, що не проходе через початок координат.
Для
цих же умов у рівнянні (1.3) позначимо
![]() та
отримаємо:
та
отримаємо:
![]() (1.5)
(1.5)
звідки видно, що механічна характеристика графічно відображається такою же прямою лінією. Обмеження, U=const, Ф=const, Rяк=const пов’язуються зі статичними уявленнями про роботу електропривода, у зв’язку з чим електромеханічні та механічні характеристики ДПС НЗ називають статичними. Характеристики двигуна при номінальних значеннях параметрів U=const, Ф=const, Rяк=const називають природними статичними характеристиками.
Природна електромеханічна характеристика (рисунок 1.1, а) – геометричне місце точок, для яких виконується рівняння електричної рівноваги якірного кола двигуна:
![]()
Статичне падіння кутової швидкості валу двигуна, викликане дією навантаження:
![]()
складає (3...7)% від швидкості ідеального неробочого ходу. Тому природні характеристики ДПС НЗ називають жорсткими. Сталі коефіцієнти В та С у рівняннях (1.4) та (1.5) визначають кут нахилу характеристик ДПС НЗ до горизонтальної осі, причому за абсолютним значенням С>B. З цієї причини нахил механічної характеристики (рисунок 1.1, б) порівняно з електромеханічною більше.
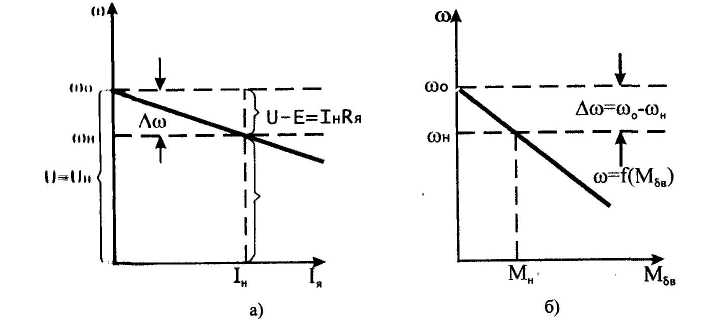
а) електромеханічна характеристика;
б) механічна характеристика.
Рисунок 1.1 – Електромеханічна і механічна характеристики ДПС.
Відповідно принципу зворотності електричних машин ДПС НЗ може працювати як у двигуневому режимі, так і у генераторному. Для генераторного режиму рівняння електричної рівноваги має вигляд:
![]()
або
![]()
При цьому ЕРС двигуна стає більше підведеної напруги і, як результат, струм якоря змінює свій напрямок. Виходячи з цього, рівняння швидкісної характеристики буде мати вигляд:
![]() (1.6)
(1.6)
Оскільки
Е>U,
то цим самим складаються умови віддачі
(рекуперації)
електричної енергії до мережі.
Підставляючи у (1.6)
![]() отримуємо
для цього режиму рівняння механічної
характеристики
отримуємо
для цього режиму рівняння механічної
характеристики
![]() .
(1.7)
.
(1.7)
З аналізу рівняння (1.7) видно, що момент двигуна М<0, тому він є гальмівним. Внаслідок цього такий режим роботи електричної машини називають режимом рекуперативного гальмування.
Якщо
двигун вимкнути від живлячої напруги
і замкнути його якірне
коло на деякий опір![]() ,
зберігши
при цьому збудження, то і в цьому разі
електрична машина буде працювати у
генераторному режимі.
Підставивши у рівняння (1.1)
,
зберігши
при цьому збудження, то і в цьому разі
електрична машина буде працювати у
генераторному режимі.
Підставивши у рівняння (1.1)
![]() ,
отримаємо для електромеханічної
характеристики рівняння:
,
отримаємо для електромеханічної
характеристики рівняння:
![]()
де
![]() ,
,
де
![]() –
гальмівний
опір, Ом.
–
гальмівний
опір, Ом.
Таким чином, режим роботи машини – генераторний. Рівняння механічної характеристики для цього режиму після підстановки у (1.3) буде мати вигляд:
![]()
Оскільки і в цьому разі М<0, то цей режим називають режимом електродинамічного гальмування.
Характеристики
ДПС НЗ, отримані при зміні параметрів![]() ,
Ф,
та
U
від
їх номінальних значень, називають
штучними. Якщо наприклад, до кола
якоря двигуна, який підіймає вантаж,
підімкнути значний опір
,
Ф,
та
U
від
їх номінальних значень, називають
штучними. Якщо наприклад, до кола
якоря двигуна, який підіймає вантаж,
підімкнути значний опір![]() .
Підвищення
опору
.
Підвищення
опору
![]() переводить
двигун з природної характеристики
на штучну, яка в наслідок цього має
більший нахил.
переводить
двигун з природної характеристики
на штучну, яка в наслідок цього має
більший нахил.
При цьому обмежуються струм й момент двигуна, у наслідок чого його кутова швидкість буде зменшуватися. При достатньо великому вантажі може змінюватися напрямок обертання двигуна. В цьому випадку і момент двигуна не змінює знак, оскільки він підімкнений на підняття вантажу. Але, оскільки рух вантажу вниз при цьому гальмується, то такий режим роботи ДПС НЗ називають режимом гальмування противвімкненням. В цих умовах ЕРС двигуна змінює знак і діє згідно з живлячою напругою:
![]() ,
,
або
![]() .
.
Електромеханічна і механічна характеристики ДПС НЗ при цьому відрізняються від виразів (1.1) та (1.3) тільки наявністю в кутовій швидкості протилежного знаку.
Усі розглянуті режими роботи ДПС НЗ для одного напрямку обертання на універсальній діаграмі (рисунок 1.2).
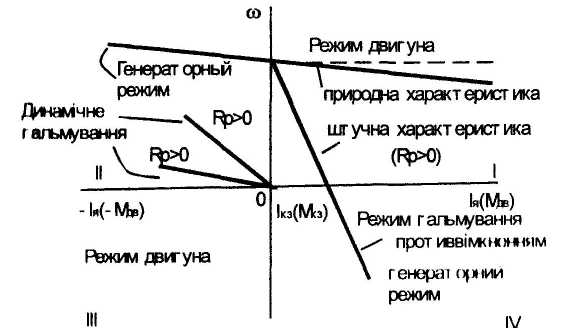
Рисунок 1.2 – Характеристики ДПС НЗ.