

6.7 Контрольні запитання
6.7.1 Суть ручного й автоматичного керування.
6.7.2 У функції яких величин можна здійснити автоматичне керування пуском електродвигуна.
6.7.3 Призначення та особливості елементів розглянутої схеми.
6.7.4 Яким чином виконане взаємне блокування контакті в реверсивного магнітного пускача.
6.7.5 Яким чином виконане у схемі самоблокування контакторів.
6.7.6 Як працює схема при ручному керуванні.
6.7.7 Як працює схема при автоматичному керуванні у функції часу.
6.7.8 Як працює схема при автоматичному керуванні у функції шляху.
6.7.9 Суть механічної характеристики асинхронного двигуна при роботі його з реверсом. Як здійснюється перехід двигуневому режиму до режиму гальмування противвімкненням з реактивним статичним моментом.
6.7.10 Використання реверсивних електроприводів, [4, 5].
Лабораторна робота №7 Керування пуском та гальмуванням асинхронного двигуна з короткозамкненим ротором
Мета роботи: вивчити режими пуску та гальмування асинхронного двигуна з короткозамкненим ротором шляхом порівняльного аналізу різних методів гальмування асинхронного двигуна з короткозамкненим ротором. На основі вивчення режимів пуску та гальмування асинхронного двигуна з короткозамкненим ротором, а також вивчення схем керування цими режимами, ознайомитися з методикою опису релейних процесів керування електроприводами за допомогою алгебри Буля та отримати деякі практичні навички проектування логічних кіл на безконтактних електричних елементах.
7.1 Основні теоретичні положення
Режим пуску характеризується споживанням енергії з мережі та наявністю вимушених складових струму, що намагнічує, та магнітного потоку.
Електромагнітні моменти під час переходу від режиму двигуна до режиму гальмування мають знакозмінний характер і основне завдання тут полягає у максимальному їх обмеженні. Для цього необхідно відповідно існуючим принципам керування зменшити швидкість зміни магнітного потоку одним з трьох способів: обмеженням похідної потоку за часом, зменшенням межі зміни магнітного потоку ні рахунок обмеження його сталого значення або за рахунок створення його деякого початкового значення.
Для двигунів з короткозамкненим ротором суттєве значення з погляду електропривода мають кратності початкового пускового моменту та початкового пускового струму.
На рисунку 7.1 зображені приблизні природні характеристики двигуна з нормальним короткозамкненим ротором. Ці характеристики показують, що двигун з короткозамкненим (ротором, споживаючи з мережі досить великий струм, має порівняно ми низький початковий пусковий момент.
Кратність початкового пускового моменту двигунів
![]() ,
,
Кратність пускового струму
![]()
Відсутність пропорційності між моментом двигуна та струмом статора під час пуску (див. рисунок 7.1) пояснюється значним зниженням магнітного потоку двигуна та зменшенням коефіцієнту потужності вторинного кола при запуску.
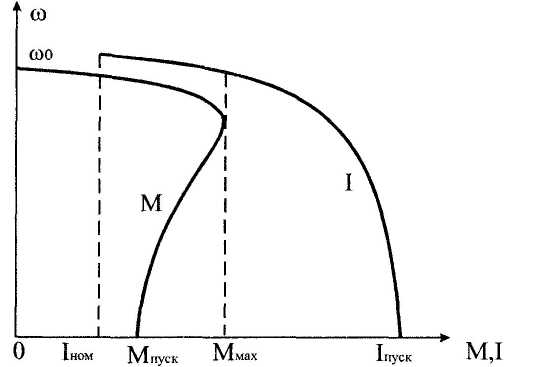
Рисунок 7.1 – Механічна та електромеханічна характеристики АД
Для підвищення початкового пускового моменту та зниження пускового струму використовують двигуни з короткозамкненим ротором спеціальних конструкцій. Усі режими гальмування є генераторними, але відрізняються один від одного процесами перетворення механічної енергії привода в електричну.
Тому характер протікання процесів гальмування визначається головним чином видом збуджуючої енергії. Збудження режиму гальмування в таких класичних способах гальмування, як противвімкнення та динамічне, здійснюється від джерел відповідно змінного та постійного струму. Гальмування противвімкнення може бути одержано зміною черговості прямування фаз обмотки статора. Ротор при цьому обертається проти напрямку руху поля й поступово сповільнюється.
Якщо у коло статора ввести додатковий змінний опір, то можна регулювати струм гальмування, момент та час зупинки двигуна. Характеристики, які отримують при цьому, зображені на рисунку 7.2

Рисунок 7.2 – Механічні характеристики АД в режимі гальмування противвімкненням
Якщо
двигун працював зі швидкістю
![]() то
при противвімкнені (припустимо, що
магнітне поле безінерційне) швидкість
залишається незмінною, а момент
змінює знак, тобто стає гальмівним
(точка А). Ковзання при цьому більше
одиниці (при
=0;
S=1).
Дійсно,
якщо підставити в вираз ковзання
то
при противвімкнені (припустимо, що
магнітне поле безінерційне) швидкість
залишається незмінною, а момент
змінює знак, тобто стає гальмівним
(точка А). Ковзання при цьому більше
одиниці (при
=0;
S=1).
Дійсно,
якщо підставити в вираз ковзання
![]() (напрямок
поля змінюється),
отримаємо
(рисунок 7.2):
(напрямок
поля змінюється),
отримаємо
(рисунок 7.2):
![]()
У
точці А двигун повинен бути відімкнений,
інакше виникає зворотний хід (реверс).
Змінюючи величину струму гальмування,
отримуємо різні значення початкових
(М' та М'') та ефективних моментів
гальмування, пропорційних площі, яка
обмежена кривими
![]() в
другому квадранті, виходячи з цього
буде змінюватися час гальмування. Для
цієї мети в кожну фазу вводять реостати.
в
другому квадранті, виходячи з цього
буде змінюватися час гальмування. Для
цієї мети в кожну фазу вводять реостати.
Контроль гальмування (відмикання двигуна в точці А) може здійснюватися ручним та автоматичним (у функції часу при використанні реле часу) способами.
Динамічне гальмування здійснюється вмиканням обмотки статора на джерело постійного струму, обмотка ротора при цьому замикається на зовнішні опори. Протікаючи по обмотці статора, постійний струм створює нерухоме поле, основна хвиля якого дає синусоїдальне розподілення індукції.
У роторі, що обертається, виникає змінний струм, який створює своє поле, яке є нерухомим відносно статора. У результаті взаємодії вихідного магнітного потоку з струмом ротора виникає змінний струм (який створює своє поле) він залежить від МРС статора та кутової швидкості ротора. Наближений вигляд характеристик при різних струмах статора вказаний на рисунку 7.3.
Зі збільшенням струму зростає ефективний гальмівний момент та, відповідно, зменшується час гальмування.
Отримання гальмівних режимів можливо і без споживання збуджуючої енергії від постійних джерел та, відповідно, за відсутності вимушених складових струму намагнічування та магнітного потоку.
Одним із способів гальмування, в якому немає споживання збуджуючої енергії з мережі, є конденсаторний, що ґрунтується на використанні ємнісного самозбудження асинхронної машини. Збуджуючись з боку статора, машина при певній кутовій швидкості генерує енергію, яка виділяється у вигляді теплоти в колі ротора. Подібні схеми гальмування не знайшли широкого використання завдяки високій вартості конденсаторів.
Формування динамічних характеристик дозволяє частково оптимізувати окремі гальмівні режими, але не усуває відомі суттєві вади кожного з чотирьох розглянутих основних способів гальмування асинхронних двигунів з короткозамкненим ротором. Так, динамічне гальмування малоефективне через малий гальмівний момент, який розвиває двигун в зоні великих швидкостей.
Конденсаторне гальмування, натомість, створюючи значні гальмівні моменти при високих кутових швидкостях, взагалі припиняє свою дію при низькій кутовій швидкості.
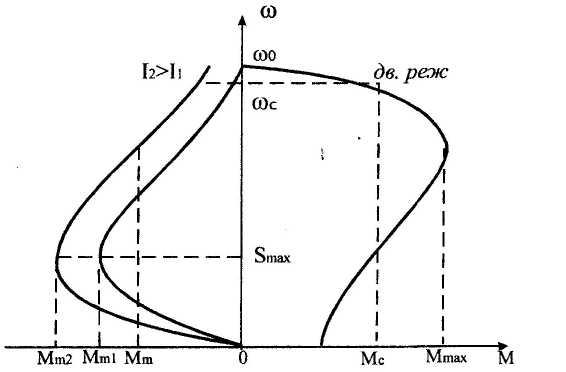
Рисунок 7.3 – Механічні характеристики АД в режимі динамічного гальмування