

Прямая идентификация параметров объекта в замкнутом контуре
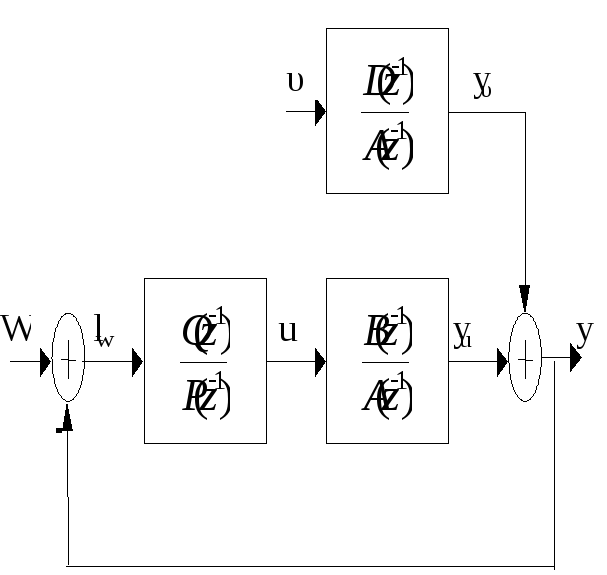
W=0; lw=-y
![]()
![]()
![]()
Представим полученные значения в виде разностных уравнений:
![]()
![]()
![]()
![]()
![]()
Отличие этого подхода – U(z)вход объекта в замкнутом контуре непроизводная функция и является функциейy(z).
Идентификация в замкнутом контуре при внешних возмущениях на выходе регулятора
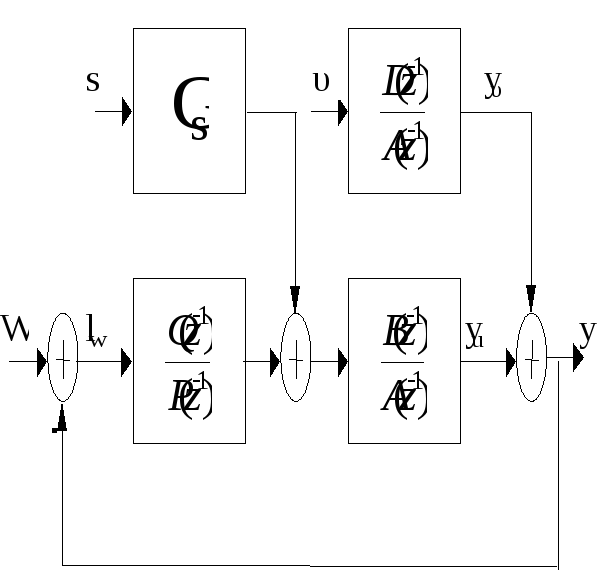
Задача сводится к идентификации на основании разносного уравнения, причем форма их будет такой же, как и без начала помехи.
![]()
![]()
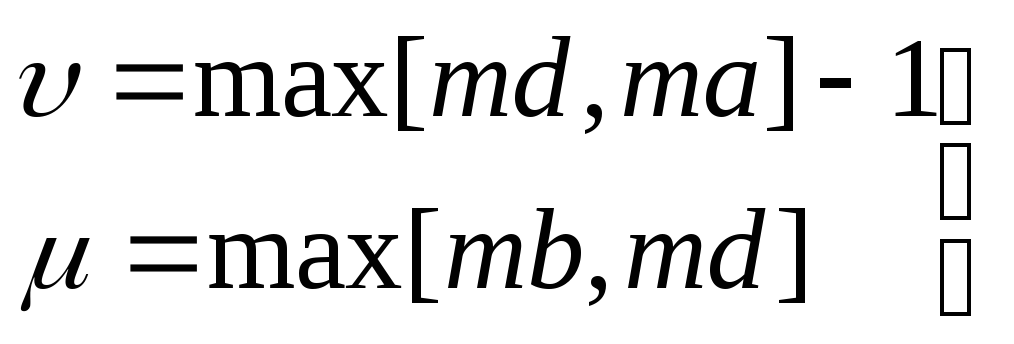
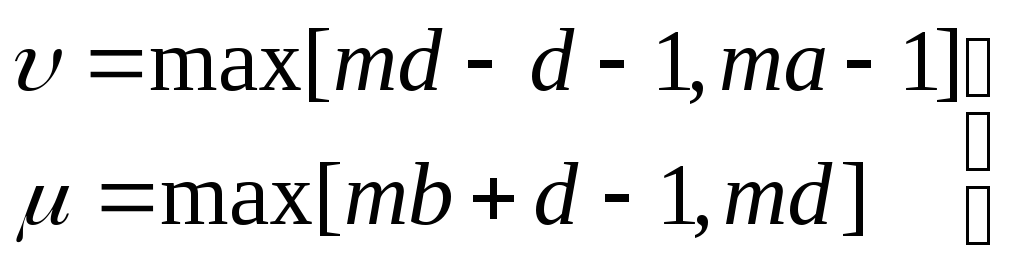
При любых значениях полином νиμне является линейной комбинацией вектора данных, т.е. всегда возможна идентификация объекта в независимости от порядкаνиμ.
Рационально можно использовать схему, при которой на начальном этапе идентификации используют ОРМНК, а при достижении некоторой стабильности используют более точные алгоритмы получения оценок.
Регуляторы с подстройкой параметров Система регулирования с подстройкой параметров
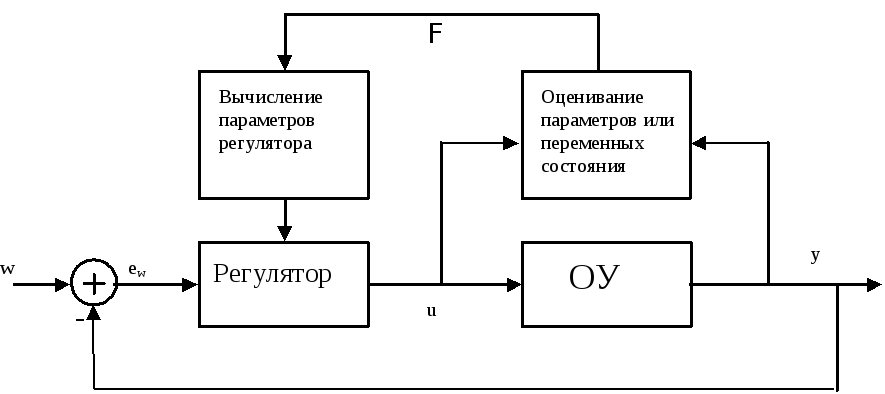
Регуляторы рассматриваемого класса различаются по признакам:
По типу мат. модели ОУ
По методу оценивания параметров модели или переменных состояния
По известной априорной информации
По критерию использования при расчете регулятора
По типу алгоритма управления реализуемого регулятором
1). Практический интерес представляют стохастические модели, причем параметрически оптимизируемы.
С точки зрения модели различают:
модель вход-выход
![]() метод максимального правдоподобия
метод максимального правдоподобия
![]() метод наименьших квадратов
метод наименьших квадратов
При рассмотрении ОУ под вектором V(z)мы будем понимать случайный процесс с мат. ожиданием и некоторой дисперсией σ2элементы вектора оцениваемых параметровθT=[а1...am b1...bm d1...dm]медленно изменяются во времени.
2). При использовании моделей в пространстве параметров состояния форма этих моделей следующая:
![]()
![]()
![]()
![]() – случайные векторы
– случайные векторы![]() – весовая матрица
– весовая матрица
3). Информация об ОУ (вектор F)
Обычно он может содержать следующие компоненты:
оценки параметров объекта:
![]() при
при![]()
![]()
модели в параметрах пространства состояния
![]()
![]()
Существует 2 подхода:
1) управление на основе принципа разделения;
2) стохастический - на основе эквивалентности.
Управление на основе принципа разделения предполагает, что процесс оценивания параметров выполняется раздельно с вычислением параметров устройства управления.
![]()
Регулятор подчиняется стохастическому закону, если его закон управления рассчитывается на основе некоторых образцовых значений х0(к)илиθ0(к).
Реализация этих двух принципов функционирования приводит к созданию двух видов, которые получили названия стохастически эквивалентные и адаптивные регуляторы пониженной чувствительности.
Регулятор, работающий при стохастически эквивалентной погрешности не учитывает.
Регуляторы, реализующие принцип разделения и использующие принцип разделения коэффициентов ошибок называются регуляторами с пониженной чувствительностью.
В зависимости от критерия синтеза различают:
дуальные регуляторы
апериодические регуляторы
регуляторы с минимальной дисперсией
регуляторы с оптимизацией параметров
линейные регуляторы
Алгоритмы управления дискретным объектом и их подстройка
Апериодический регулятор с конечным временем установления.
![]() ;
;![]()
![]()
![]() ;
;![]() ;
;![]()
Апериодический регулятор с конечным временем, обеспечивавшим управление с любым объектом, а настройки в большей степени определяется параметрами канала помехи объекта. Апериодический регулятор обеспечивает управление с достаточно низкой точностью. Подстройка сводится к подстройке параметров для компенсации помех.
Регулятор с минимальной дисперсией:
ri и Fi– определяют через коэффициентапо рекуррентной формуле
f0=1,
![]() ;
i=1…d
;
i=1…d
![]() ; i=0…m
; i=0…m
Для объекта без запаздывания, т.е. при d=0регулятор с минимальной дисперсией будет
Если выполняется это условие, то алгоритм обладает подстройкой параметров.
Когда
![]()
Регулятор с минимизацией дисперсии может применяться в системах, объект которых обеспечивает выполнение условий идентификации объекта по μ и ν.
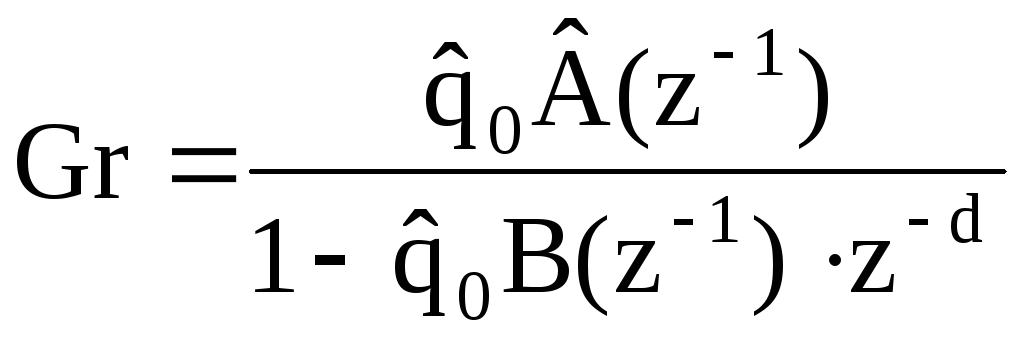
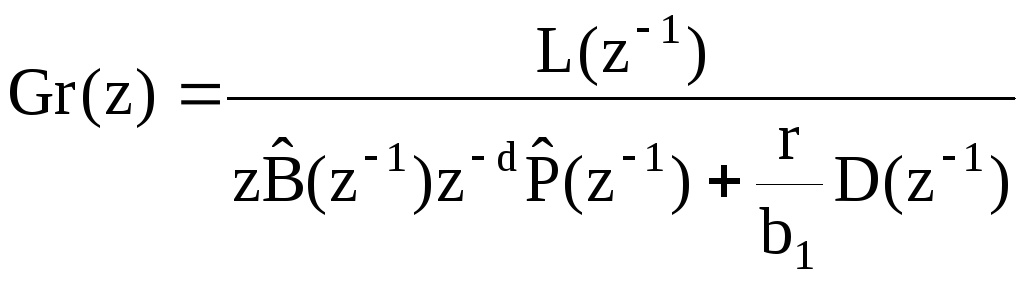
Регуляторы с оптимизируемыми параметрами.
![]()
Порядок знаменателя объекта должен быть меньше на 2 порядка числа тактов запаздывания.
![]()
Если порядок знаменателя будет на 2 порядка выше, чем запаздывание, то подстройку сделать нельзя.
Существует несколько методик синтеза параметрически оптимизируемых регуляторов.
Простейшей является методика по заданному расположению полюсов передаточной функции замкнутой системы.
Характеристическое уравнение замкнутой системы имеет вид:
![]()
![]()
Порядок числителя ν1, знаменателя1-z-1
![]()
Пусть d=0:
![]()
![]()
![]()
![]()
![]()
При условии, что синтез корней расположен на комплексной полуплоскости, - можем на каждом шаге найти параметры регулятора.