

Методичка к лабораторной работе №4
.docУ Г А Т У
Кафедра АТC
ЛАБОРАТОРНАЯ РАБОТA №4
По курсу “Моделирование систем управления”
МЕТОД ЭЛЕКТРОАНАЛОГИЙ
Разработал:
доц. ЧИКУРОВ Н.Г.
1.МЕТОД ЭЛЕКТРОАНАЛОГИЙ.
С самого зарождения электротехники в ней стали широко применяться электрические схемы в качестве некоторых наглядных образов изучаемых объектов.
Поскольку именно электрические схемы обладают наибольшей наглядностью и изученностью, то благодаря единству уравнений объектов различной физической природы исследование явлений в неэлектрической системе может быть заменено исследованием процессов в электрической цепи. Сравнивая компонентные уравнения легко обнаружить динамические аналогии всех рассмотренных видов систем.
Сведем все полученные компонентные уравнения элементов динамических систем различной физической природы в таблицу.
-
Тип элемента
Вид системы
Механическая
Гидрав-лическая
Тепловая
Электри-ческая
Поступ.
Вращат.
Инер-ционный



Диссипа-тивный

Упругий
—
Топологические уравнения этих систем так же абсолютно аналогичны. В этом проявляется единство физических законов, несмотря на многообразие физических материй.
Составим таблицу переменных и их единиц для систем различной физической природы.
-
Тип элемента
Вид системы
Механическая
Гидрав-лическая
Тепловая
Электри-ческая
Поступ.
Вращат.
Типа потен-циала
Сила
F, Н
Враща-ющий момент
M, Нм
Давление
p, Па
Темпера-тура
T, К
Напря-жение
U, В
Типа потока
Скорость
V, м/с
Угловая скорость
, рад/с
Расход
Q, м3/с
Тепловой поток
Ф, Вт
Ток
I, А
П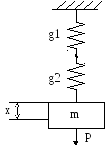 ример
1: Составим
математическую модель груза массой m
подвешенного на двух пружинах с
податливостями g1=1/c1
и g2=1/c2.
ример
1: Составим
математическую модель груза массой m
подвешенного на двух пружинах с
податливостями g1=1/c1
и g2=1/c2.
В соответствии с таблицей электроаналогий строим электрическую схему эквивалентную данному механическому устройству. Чтобы не
вводить новых обозначений, индуктивности, емкости, эдс, напряжения и токи в электрических схемах будем обозначать с помощью соответствующих символов принятых в механике.
В данном механизме скорости деформаций пружин V1 и V2 складываются, причем усилие на обоих пружинах Fу одинаковое. Этому условию соответствует параллельное включение емкостей в электрической схеме.

Уравнения Кирхгофа:

П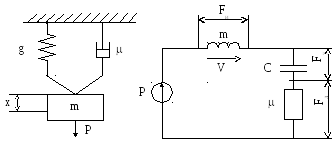 ример
2: Построить
эквивалентную электрическую схему
механического устройства.
ример
2: Построить
эквивалентную электрическую схему
механического устройства.
В данном устройстве скорости деформаций пружины и демпфера одинаковы и равны скорости движения груза. В электрической схеме этому условию соответствует последовательное соединение индуктивности, емкости и сопротивления.
Пример 3. Построить эквивалентную электрическую схему двухмассовой модели механического устройства.

Эквивалентная электрическая схема устройства.
П РАВИЛА
ПОСТРОЕНИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
МЕХАНИЧЕСКИХ УСТРОЙСТВ
РАВИЛА
ПОСТРОЕНИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
МЕХАНИЧЕСКИХ УСТРОЙСТВ
-
Систему разделяют так, чтобы каждая подсистема содержала одну сосредоточенную массу. Количество подсистем должно быть равно числу сосредоточенных масс механического устройства.
-
Движущие силы, действующие на подсистему, следует отмечать кружками и представлять эти силы на электрической схеме в виде источников Э.Д.С.
-
Силы сопротивления, действующие на подсистему, следует обозначать на электрической в виде напряжений между соответствующими узлами.
-
Для обозначения электрических элементов использовать символы, которыми обозначены аналогичные элементы механического устройства.
2. ЗАДАНИЕ К ЛАБОРАТОРНОЙ РАБОТЕ.
-
1. Получить у преподавателя вариант задания на лабораторную работу. В соответствии с заданием разработать математическую модель динамической системы.
-
2. Ввести в ЭВМ модель динамической системы. Установив коэффициенты демпфирования h=0, построить график переходного процесса в системе.
-
3. Установить заданные значения коэффициентов демпфирования и повторить эксперимент.