

Методика идентификации фильтра помехи реальной модели дискретного объекта
Входное воздействие Uдолжно быть таким, чтобы значениеyuв 2-3 раза превышало уровень значения аддитивной помехиyυ.
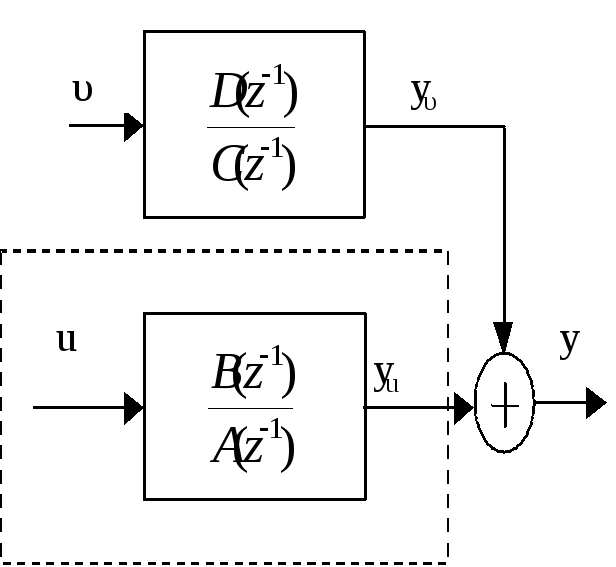
Взяв в качестве текущего значения выхода модели yи рассматривая случайный процессυκак некоторую детерминированную величину, которая имеет фиксированные значения в определенные моменты времени, измерять которые мы не можем, но динамику поведения фильтра в первом приближении можем описать разностным уравнением по форме больше похожему на разностные уравнения основного канала.
![]()
![]()
![]()
В качестве вектора измерений мы возьмем некоторый вектор, содержащий непосредственное измерение значения уи оценки помехи в предыдущие моменты времени.
![]()
Вводя в вектор измерений оценки случайного
процесса
![]() получаемые на предыдущем шаге расчетным
путем и рассматривая вектор θ (вектор
оцениваемых параметров),
получаемые на предыдущем шаге расчетным
путем и рассматривая вектор θ (вектор
оцениваемых параметров),![]() мы можем свести задачу идентификации
фильтра помехи в типовой задаче
идентификации дискретного объекта
РМНК.
мы можем свести задачу идентификации
фильтра помехи в типовой задаче
идентификации дискретного объекта
РМНК.
Обобщенный рекуррентный метод наименьших квадратов (ормнк)
Позволяет решать задачи идентификации дискретной модели для случая когда модель описывается разностным уравнением:
![]()
Представив в качестве моделей дискретного объекта это уравнение попытаемся применить известные процедуры идентификации к этому объекту, исходным является уравнение в матричной форме.
![]()
В качестве вектора измерений используем следующий вектор:
![]()
![]()
![]()
ОРМНК базируется на использовании процедур и формул при вычислении вектора
Отличия – вектор измерений содержит расчетные компоненты, длина расчетной выборки должна быть больше на “р” по сравнению с классическим методом, начальные условия по заданию вектора коррекции и матрицы преобразования “р” точно также как и в классическом методе, причем νктакже полагается равным нулю.
РМНК и ОРМНК обладают достаточно низкой сходимостью при оценке интересующих нас коэффициентов. Они дают удовлетворительные результаты, если объект находится в возбужденном состоянии, выборка вход-выход является наиболее информативной.
Метод стохастической аппроксимации(мса)
МСА является рекуррентным методом, причем в основе алгоритма лежит формула:
![]()
ρзависит от такта наблюдения
![]()
α‑ число, подбираемое экспериментально с помощью которого регулируют скорость старения данных.
Методы повышения численной устойчивости рекуррентных алгоритмов идентификации
Если в классическом рекуррентном методе и его модификациях при определении параметров модели мы использовали значение вектора измерений и компоненты вектора ошибки на текущем шаге измерений с одинаковым весом.
![]()
![]()
![]()
![]()
В качестве примера: N’=50,
![]()
|
|
1 |
10 |
20 |
30 |
40 |
47 |
49 |
50 |
|
0.99 |
0.61 |
0.67 |
0.73 |
0.82 |
0.9 |
0.97 |
0.99 |
1 |
|
0.95 |
0.08 |
0.13 |
0.21 |
0.35 |
0.6 |
0.85 |
0.95 |
1 |
Выбор начального значения λпредставляет собой сложную задачу в теории идентификации. Как показывает анализ таблицы значение весовых коэффициентов вектора ошибки существенно зависит от значения λ. Общей теории расчетаλне существует, как правило предлагаются методы адаптации – идентификации на некотором интервале определяется с целью определения λ, которая гарантирует численную устойчивость решения задачи идентификации на некотором интервале наблюдения.
Другие способы
![]() определения
λ:
определения
λ:
![]()
![]()
![]()
![]()
![]()