Оценка адекватности статистических моделей
Для оценки адекватности полученной выборки используют вероятностный способ оценки по критерию Фишера.
|
x |
yэ |
yp |
(yp-yэ)2 |
|
x1 |
|
|
|
|
x2 |
|
|
|
|
. . . |
|
|
|
|
xn |
|
|
|
Если расчётное значение критерия Фишера для соответствующего числа степеней свободы не больше, чем соответственное табличное значение критерия, то полученная статистическая модель с вероятностью 0,95 адекватна экспериментальной выборке:
Fp(α,β)≤Fт(α,β)
Расчетное значение критерия Фишера Fpопределяют следующим образом:
![]()
,где α,β – числа степеней свободы числителя и знаменателя соответственно;
Sад– дисперсия адекватности;
Sв– дисперсия воспроизводимости.
Причем в данной формуле в числитель нужно ставить ту дисперсию из двух, которая больше. Таким образом значение критерия Фишера не может быть меньше единицы.
Выражение для дисперсии адекватности:
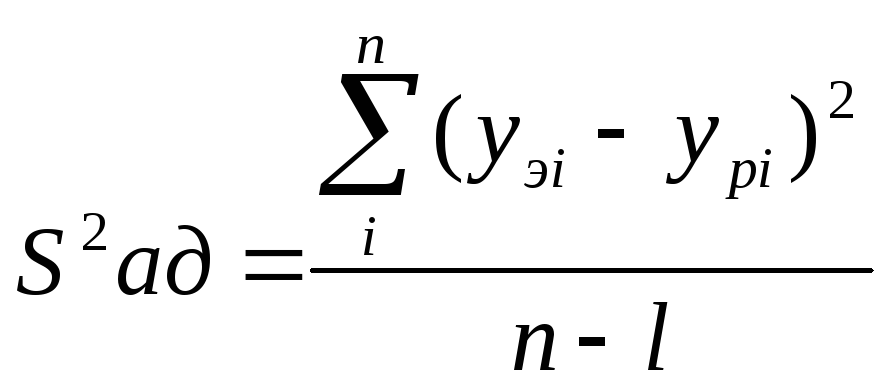
n – количество опытов (точек);
l – количество неизвестных коэффициентов в уравнении регрессии.
Число степеней свободы числителя равно α=(n-l).
Определение дисперсии воспроизводимости различается для различных способов постановки эксперимента.
в случае, когда не выполняют параллельных опытов:
![]() ,
,
где Δymax– максимальная погрешность измерения выхода для данного эксперимента. Фактически Δymax- это сумма инструментальной и методологической погрешностей. В таком случае число степеней свободы β = ∞.
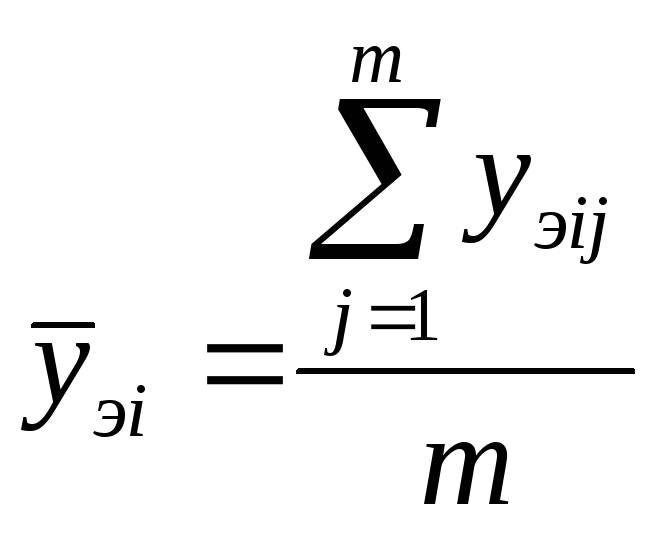
если для каждого значения xiставятся параллельные опыты (с целью повышения достоверности), то определение дисперсии воспроизводимости требует дополнительных расчетов. В качестве значения выхода дляxiпринимают среднее значениеy:
 ,
,
где m– число параллельных опытов.
Для каждого значения xiопределяют построчную дисперсию:

Таким образом получается mзначений дисперсии. Из них берут наибольшую и наименьшую и производят оценку однородности выборки по критерию Фишера.
Расчетное значение критерия в этом случае
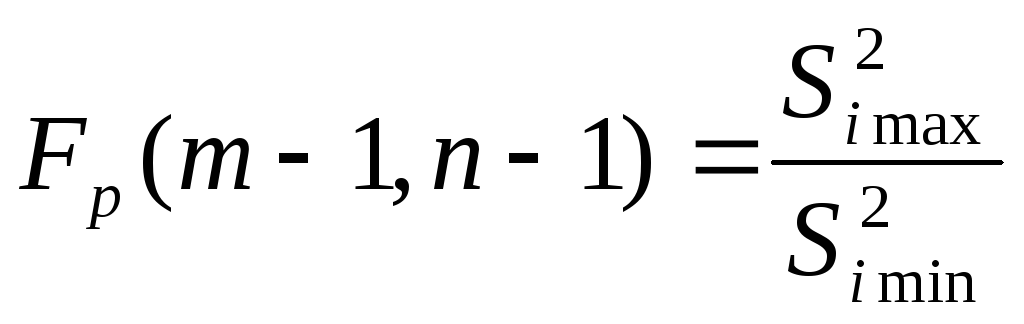
Если выполняется условие Fp(m-1,n-1)≤Fт, то выборка однородна и в качестве дисперсии воспроизводимости берем средневзвешенную дисперсию по всей экспериментальной выборке:
Если же выборка неоднородна, то её нельзя использовать для получения модели объекта.
Часто средневзвешенную дисперсию используют также для оценки адекватности моделей различных типов.
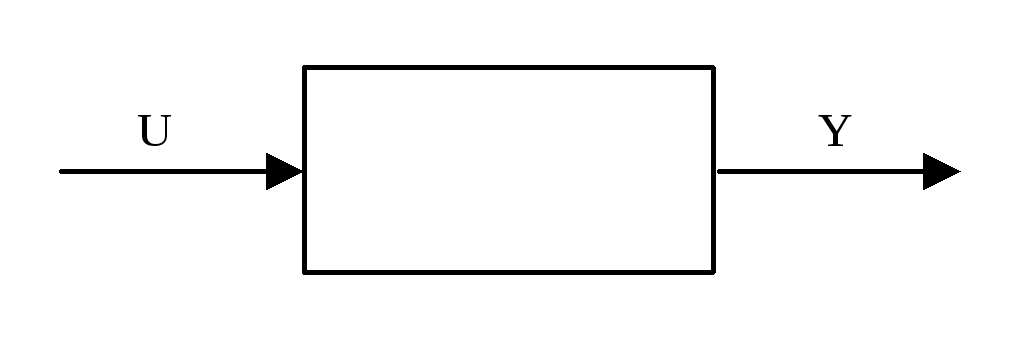
Методы идентификации динамических объектов и моделей случайных сигналов Модели объектов управления в дискретной форме представления
Используя понятие разности как аналог производной для дискретных систем универсальной характеристикой с помощью которой можно описывать динамику системы является разностное уравнение.
y(k+n)+a1y(k+n-1)+a2y(k+n-2)+...+any(k)=
b0U(k+n)+b1U(k+n-1)+...+bnU(k)
Решая это уравнение мы сможем получать единственные характеристики.
Дискретные передаточные функции

![]()
Если в системе имеются некоторые переменные, которые характеризуют внутренние свойства динамики объекта, то зная изменение этих переменных во времени мы можем говорить о динамике системы или объекта в целом.
Переменные состояния этого объекта:
y(k)=x1(k)
y(k+1)=x2(k)=x1(k+1)
![]()
y(k+n-1)=xn(k)=xn-1(k+1)
y(k+n)=xn(k+1)
Взяв от bnдо bn-1равно 0, bn=1 и подставив соответствующие значения переменной состояния в соответствующее уравнение можем представить так:
y(k+n)=xn(k+1)=-a1xn(k)- a2xn-1(k)-...- anx1(k)+U(k)
Тогда это уравнение можно представить в следующей векторно-матричной форме:
|
| ||||
|
|
(1) |
(2) |
(3) |
(4) |

– матрица динамики
– вектор переменных состояния
– матрица управления
– вектор управления
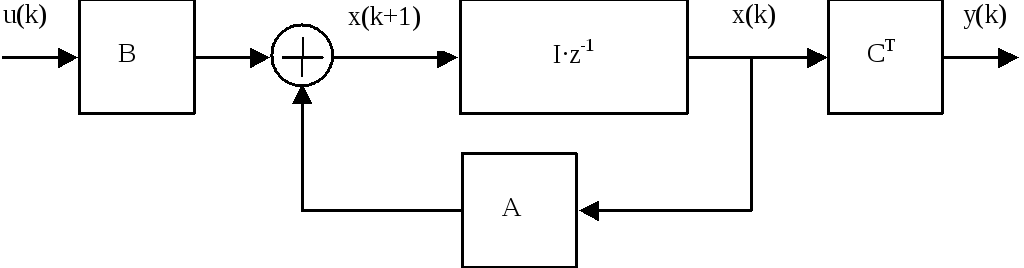
Компактная запись данного выражения:
x(k+1)=Ax(k)+BU(k)
y(k)=CTx(k)