

18. Румбы. Связь румбов с дирекционными углами.
румбом называется острый горизонтальный угол, отсчитываемый от ближайшего направления осевого меридиана (северного или южного) до данной линии. Румбы обозначают буквой r с индексом, указывающим четверть, в которой находится румб.
Зависимость между дирекционными углами и румбами определяется для четвертей по следующим формулам:
I четверть (СВ) r = α
II четверть (ЮВ) r = 180° – α
III четверть (ЮЗ) r = α – 180°
IV четверть (СЗ) r = 360° – α
Румб в точке М направления ВС называется прямым, а противоположного направления СВ – обратным. Прямой и обратный румб в одной и той же точке данной линии равны по численному значению, но имеют индексы противоположных четвертей.
19. Прямая геодезическая задача
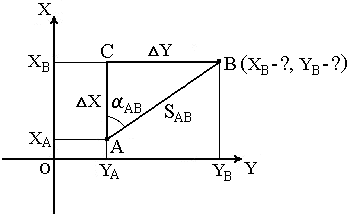
В геодезии часто приходится передавать координаты с одной точки на другую. Например, зная исходные координаты точки А (рис.23), горизонтальное расстояние SAB от неё до точки В и направление линии, соединяющей обе точки (дирекционный угол αAB или румб rAB), можно определить координаты точки В. В такой постановке передача координат называется прямой геодезической задачей.
Для точек, расположенных на сфероиде, решение данной задачи представляет значительные трудности. Для точек на плоскости она решается следующим образом.
Дано: Точка А( XA, YA ), SAB и αAB. Найти: точку В( XB, YB ).
Непосредственно из рисунка имеем:
ΔX = XB – XA ; ΔY = YB – YA .
Разности ΔX и ΔY координат точек последующей и предыдущей называются приращениями координат. Они представляют собой проекции отрезка АВ на соответствующие оси координат. Их значения находим из прямоугольного прямоугольника АВС:
ΔX = SAB · cos αAB ;ΔY = SAB · sin αAB .
Так как в этих формулах SAB всегда число положительное, то знаки приращений координат ΔX и ΔY зависят от знаков cos αAB и sin αAB.
При помощи румба приращения координат вычисляют по формулам:
ΔX = SAB · cos rAB ;ΔY = SAB · sin rAB .
Знаки приращениям дают в зависимости от названия румба. Вычислив приращения координат, находим искомые координаты другой точки:
XB = XA + ΔX ; YB = YA + ΔY .
Таким образом можно найти координаты любого числа точек по правилу: координаты последующей точки равны координатам предыдущей точки плюс соответствующие приращения.
Контроль
вычислений координат выполняют по
формуле
![]()
20. Обратная геодезическая задача
Обратная геодезическая задача – это вычисление дирекционного угла α и длины S линии, соединяющей два пункта с известными координатами X1, Y1 и X2, Y2
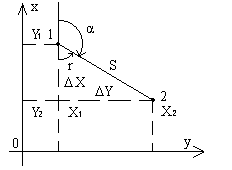
Построим на отрезке 1-2 как на гипотенузе прямоугольный треугольник с катетами, параллельными осям координат. В этом треугольнике гипотенуза равна S, катеты равны приращениям координат точек 1 и 2 ( ΔX = X2 – X1, ΔY = Y2 – Y1 ), а один из острых углов равен румбу r линии 1-2.
Если
Δ X 00 и Δ Y 00, то решаем треугольник по
известным формулам:
![]()
![]() Для
данного рисунка направление линии 1-2
находится во второй четверти, поэтому
на основании (1.22) находим:
Для
данного рисунка направление линии 1-2
находится во второй четверти, поэтому
на основании (1.22) находим:
![]()
Общий порядок нахождения дирекционного угла линии 1-2 включает две операции:
* определение номера четверти по знакам приращений координат Δ>X и ΔY (рис.1.4-а),
*
вычисление α по формулам связи (1.22) в
соответствии с номером четверти.Контролем
правильности вычислений является
выполнение равенства:
![]()
Контроль: d . cos α + XA = XB, d . sin α + YB = YB.