

Принципы автоматического управления.
![]()
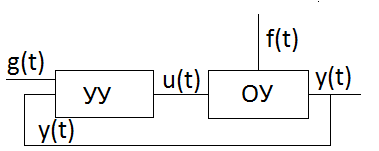
УУ – устройство управления – комплексное техническое средство, которое вырабатывает управляющее воздействие.
ОУ – объект управления (объект, для достижения желаемых результатов функционирования которого необходимы и допустимы специальные органические воздействия. Объект управления, подвергаемый управляющим воздействиям, называется управляемым объектом).
Сигналы:
1) y(t) – состояние ОУ, несёт (физическая величина) информацию о состоянии объекта, выходная величина.
2) g(t) – задающее воздействие, та величина, в соответствии с которой должен изменяться y(t), входная величина. y(t)→g(t)
3) u(t) – управляющее воздействие.
4) f(t) – вектор возможного воздействия, с его помощью учитывается влияние окружающе среды на всю систему управления.
y(t)=F{g(t),y(t),f(t)}
В зависимости от набора элементов различают и принципы автоматического управления:
УУ→РУ (регулирующее устройство)
управление по отклонению (принцип Ползунова-Уатта):
![]()
ООС – отрицательная обратная связь (сигнал с выхода на вход, замкнутая САУ)



e(t) может изменяться,
если изменятся g(t) и/или y(x) [f(t)] – внешние
воздействия. Условие работы замкнутой
системы:
а) g(t)=var; f(t)=const, y(t)=const
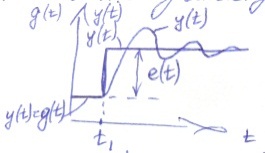
б) g(t)=const; f(t)→y(t)=var

управление по возмущению (принцип Понселе):
f(t)=fдет(t) – известная (наблюдаемая) величина. Возмущение – детерминированная величина. Если система по отклонению – замкнутая, то по возмущению – разомкнутая САУ.
Разомкнутая САУ:
1.Собственно, управление по возмущению:
![]()
f(t) – возмущение, y(t)→g(t)
2.Система программного управления
![]()
f(t)=fзад(t)→g(t), директивное управление
комбинированное управление (по отклонению и возмущению). Всегда считается, что f(t)=fдет(t)+fслуч(t). Основным является принцип управления по отклонению.
![]()
ИУ – измерительное устройство. Замкнутая САУ:
e(t)=g(t)-y(t), u(t)=F3[e(t),fдет(t)], u=F3[g(t),y(t),fдет(t)].
Принцип по отклонению – компенсация g(t) за счёт fслуч(t)→y(t);
Принцип по возмущению – компенсация действия возмущения fдет(t).
адаптивное управление:
Адаптация – приспособление к изменениям окружающей среды. ОС влияет на отдельные элементы, следовательно, и на параметры и мат.мод. объекта управления.
W0(p,a) – математическая модель ОУ (p=d/dt)
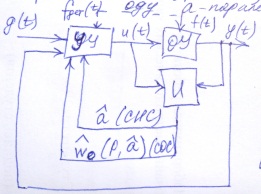
И
– идентификатор на основе измерения
входных и выходных переменных
восстанавливает математическую модель
и параметры объекта;
 -
оценки параметров; СНС – самонастраивающаяся
система (u(t)=F41[g(t),f(t),
]),
СОС – самоорганизующаяся
система(u(t)=F42[g(t),f(t),
-
оценки параметров; СНС – самонастраивающаяся
система (u(t)=F41[g(t),f(t),
]),
СОС – самоорганизующаяся
система(u(t)=F42[g(t),f(t), ])
])
Функционально необходимые элементы систем.
Под САУ понимается совокупность объекта управления (ОУ) и управляющего устройства (УУ).
![]()
УУ – устройство управления:
1)У – усилитель.
2)УМ – усилители мощности.
3)СМ – сервомеханизм (преобразует эл/сигнал непосредственно в сигнал управления объектом).
ОУ – объект управления (объект, для достижения желаемых результатов функционирования которого необходимы и допустимы специальные органические воздействия. Объект управления, подвергаемый управляющим воздействиям, называется управляемым объектом):
1)О – объект – физическое устройство, характеризуется какой-либо физической величиной.
2)ЧЭ – чувствительный элемент, информационно-измерительное устройство (датчик).
x(t) – реальный физический сигнал, характеризуемый состоянием объекта.
y(t)=k*x(t) – сигнал имеет ту же физическую природу, что и задающее воздействие g(t).
e(t)=g(t)-y(t) – ошибка.
u(t) – управляющее воздействие.
Дополнительно вводят: регулятор (РУ), корректирующее устройство (КУ, в дополнение к УУ).