

6.Базисные и свободные неизвестные.
7. Однородные системы. Свойства решений (существование, линейность множества решений).
Любая однородная система линейных алгебраических уравнений, ранг матрицы которой равен r, с помощью элементарных преобразований может быть приведена к каноническому виду:
Общее решение однородной линейной системы, записанной в каноническом виде, очевидно, определяется формулами:
Свободные переменные xr+1 , xr+2 , ..., xm−1, xm могут принимать произвольные значения.
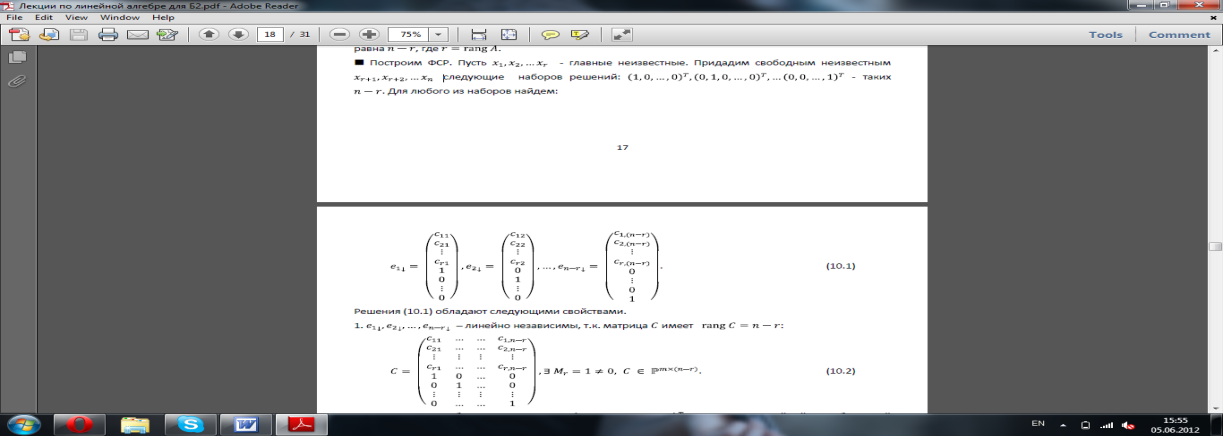
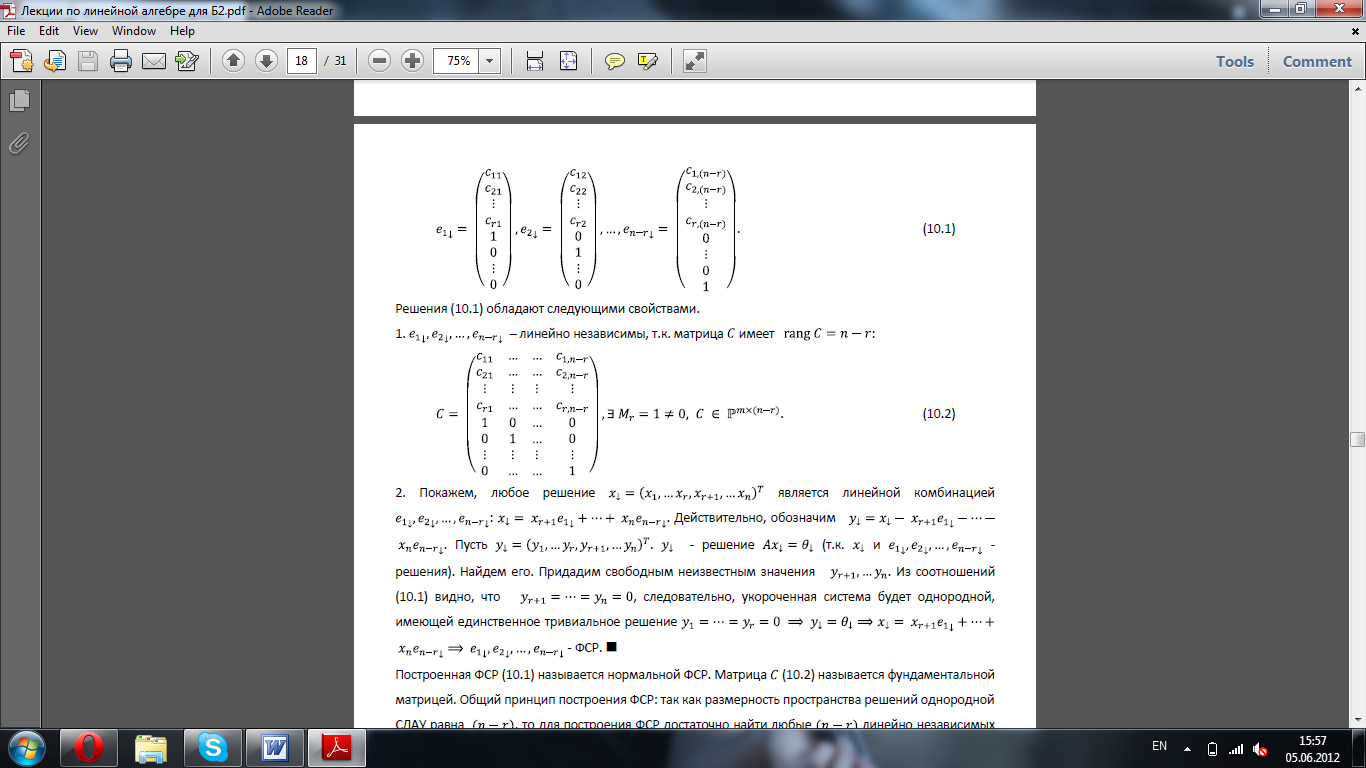
Вычисленные по этим формулам n − r линейно независимых решений образуют фундаментальную систему решений:
Тогда общее решение системы можно записать в вектороной форме в виде:
![]()
Здесь С1, С2, ..., Сn−r−1, Сn−r — произвольные константы
8.Фундаментальная система решений.
Определение 10.1 Произвольный базис пространства решений однородной СЛАУ называется фундаментальной системой решений (ФСР).
ФСР существует лишь в том случае, когда однородная СЛАУ имеет нетривиальное решение. При этом СУ может обладать многими ФСР. Однако все эти системы состоят из одинакового числа векторов, равного максимальному числу линейно независимых решений однородных СЛАУ.
9.Теорема о числе векторов в фундаментальной системе решений.
11,12.Неоднородные системы.
Тема 4. Линейные пространства.
1.Линейные пространства.
P - мн-во вещест. или комплекс. чисел (P=R,P=C)
Теорема. Непустое мн-во V наз-ся линейным пространством над P,
если на этом множестве определены 3 операции:
1)сложение
 (взятых
в опр. порядке
(взятых
в опр. порядке
2)умножение
на число
3)операции умножения и сложения на число обладающ. след. св-ми:

 ;
б)
;
б) ;
в)
;
в)
г) противополож. эл-нт:
противополож. эл-нт:
 ;
д)
;
д)
e) ж)
ж) з)
з)
V - ЛП, Р=R - вещ. ЛП; V - ЛП над С- комплексное ЛП.
Пример:
1) ЛП свободных векторов; 2)
ЛП свободных векторов; 2)
3)
Ариф. пр-ва
 4)
4)

2. Аксиоматика линейного пространства, свойства, вытекающие из определения.
Свойства ЛП:
1)В ЛП единственный нулевой элемент
Док-во:
Пусть

2)
Док-во:
3)В
ЛП

Док-во:
 ,
,
 ,
,

4)В
ЛП из

Док-во:
5)
Док-во:
6)Разность
a и b

Док-во: a=b+c=b+a+b'=(b+b')+a=a
Единственность:
Пусть

3.Примеры линейных пространств.
Пример:
1) ЛП свободных векторов;
2)
3) Ариф. пр-ва 4)
.
4.Линейно зависимые и линейно независимые системы векторов и их свойства.
Опр. -
ЛЗ, если
-
ЛЗ, если
 и
и
 Если
равенство возмож. только при
Если
равенство возмож. только при

то эл-ты ЛНЗ.
Критерий:
-
ЛЗ хотя
бы один вектор линейно выражается ч/з
другие.
хотя
бы один вектор линейно выражается ч/з
другие.
Док-во: "Пусть
-
ЛЗ
"Пусть
-
ЛЗ (
(
Пусть


Пусть
-1
 система ЛЗ.
система ЛЗ.
Свойства:
1. Любая система векторов e1,e2, ..., ek линейного пространства, содержащая нулевой вектор, линейн зависима.
2. Любая система векторов e1,e2, ..., ek линейного пространства, содержащая пару взаимно противоположных векторов, линейн зависима.
3. Любая подсистема векторов линейно независимой системы векторов линейного пространства линейно независима.
4. Любая система векторов линейного пространства, содержащая линейно зависимую подсистему векторов, линейно зависима.
5. Система векторов линейного пространства линейно зависма тогда и только тогда, когда хотя бы один из векторов системы линейно выражается через остальные векторы системы (представлен в виде разложения по векторам системы).
6. Система векторов линейного пространства линейно независма любая её подсистемы векторов.
6. Система векторов, состоящая из одного ненулевого вектора линейного прострранства, линейно независима.