

Вычислим первую конечную разность многочлена Pn(X) в точке х0
![]() ,
но
,
но
![]() откуда
откуда![]() .
.
Чтобы определить
коэффициент а2, составим конечную
разность второго порядка![]() Отсюда после преобразования получим
Отсюда после преобразования получим![]() .
Вычисляя конечные разности более высоких
порядков и полагая х=х0, придем к
общей формуле для определения
коэффициентов:
.
Вычисляя конечные разности более высоких
порядков и полагая х=х0, придем к
общей формуле для определения
коэффициентов:![]() (i=0,1,2,…,n).
(i=0,1,2,…,n).
Подставим значения
![]() в многочлен, в результате получим первую
интерполяционную формулу Ньютона:
в многочлен, в результате получим первую
интерполяционную формулу Ньютона:
![]()
Первую интерполяционную формулу можно записать в том виде, в котором ее удобнее использовать для интерполирования в начале таблицы. Для этого введем переменную q=(x-x0)/h, гдеh-шаг интерполирования, аq-число шагов. Тогда первая формула примет вид
![]()
5.2.2 Вторая интерполяционная формула Ньютона
Эта формула используется для интерполирования в конце таблицы. Построим интерполяционный многочлен вида
![]()
Неизвестные
коэффициенты а0,а1,…,аnподберем так, чтобы были выполнены
равенства![]() .
Для этого необходимо и достаточно, чтобы
.
Для этого необходимо и достаточно, чтобы![]() (i=0,1,…,n).
(i=0,1,…,n).
В случае, если
положить
![]() ,
то сразу определяется коэффициент а0
,
то сразу определяется коэффициент а0
![]() .
.
Из
выражения для первой конечной разности
найдем![]() :
:
![]()
Отсюда, полагая
х=хn-1получим![]() .
Из выражения для второй конечной разности
найдем а2:
.
Из выражения для второй конечной разности
найдем а2: .
Общая формула для коэффициентааiимеет вид
.
Общая формула для коэффициентааiимеет вид![]() .
.
Подставим эти коэффициенты в формулу многочлена и получим вторую интерполяционную формулу Ньютона:
![]()
На практике используют формулу Ньютона в другом виде. Положим q=(x-xn)/h. Тогда
![]() .
.
5.3 Интерполирование сплайнами
Многочлен Лагранжа
или Ньютона на всем отрезке
![]() с использованием большого числа узлов
интерполирования часто приводит к
плохому приближению, что объясняется
накоплением погрешностей в ходе
вычислений. Кроме того, из-за расходимости
процесса интерполирования увеличение
числа узлов не обязано приводить к
повышению точности вычислений. В силу
вышесказанного на практике весь отрезок
с использованием большого числа узлов
интерполирования часто приводит к
плохому приближению, что объясняется
накоплением погрешностей в ходе
вычислений. Кроме того, из-за расходимости
процесса интерполирования увеличение
числа узлов не обязано приводить к
повышению точности вычислений. В силу
вышесказанного на практике весь отрезок![]() разбивается на частичные интервалы и
на каждом из них приближающая функция
разбивается на частичные интервалы и
на каждом из них приближающая функция![]() заменяется многочленом невысокой
степени. Такая интерполяция называется
кусочно-полиномиальной интерполяцией.
заменяется многочленом невысокой
степени. Такая интерполяция называется
кусочно-полиномиальной интерполяцией.
Определение.
Сплайн - функцией называют
кусочно-полиномиальную функцию,
определенную на отрезке![]() и имеющую на этом отрезке некоторое
число непрерывных производных.
и имеющую на этом отрезке некоторое
число непрерывных производных.
Слово сплайн означает гибкую линейку, которую используют для проведения гладких кривых через определенное число точек на плоскости. Преимущество сплайнов - сходимость и устойчивость процесса вычисления. Рассмотрим частный случай (часто используемый на практике), когда сплайн определяется многочленом третьей степени.
5.3.1 Построение кубического сплайна
Пусть на отрезке
![]() в узлах сетки заданы значения некоторой
функции
в узлах сетки заданы значения некоторой
функции![]() ,
т.е.
,
т.е.![]() ,
,![]() (i=
0,1,…,n).
(i=
0,1,…,n).
Сплайном,
соответствующим этим узлам функции
![]() называется функцияS(х),
которая:
называется функцияS(х),
которая:
1) на каждом частичном отрезке является многочленом третьей степени;
функция
 и ее первые две производные
и ее первые две производные непрерывны на
непрерывны на ;
; .
.
На каждом частичном
отрезке
![]() будем искать сплайн
будем искать сплайн![]() ,
где
,
где![]() многочлен третьей степени
многочлен третьей степени
![]() .
(5.8)
.
(5.8)
То есть для
![]()
![]() нужно построить такую функцию
нужно построить такую функцию![]() ,
где
,
где![]() подлежат определению. Для всего отрезка
интерполирования
подлежат определению. Для всего отрезка
интерполирования![]() ,
таким образом, необходимо определить
4nнеизвестных коэффициента.
,
таким образом, необходимо определить
4nнеизвестных коэффициента.
Доопределим
![]() .
Требование непрерывности функцииS(x)приводит к условиям
.
Требование непрерывности функцииS(x)приводит к условиям![]() (i=0, 1,…,n-1).
(i=0, 1,…,n-1).
Отсюда из (5.8) получаем следующие уравнения:
![]() (i=
1,2,…,n-1).
(i=
1,2,…,n-1).
Введем
шаг интерполирования
![]() .
Тогда последнее равенство можно
переписать в виде
.
Тогда последнее равенство можно
переписать в виде (i=
1,2,…,n).
Из непрерывности первой производной
следует
(i=
1,2,…,n).
Из непрерывности первой производной
следует
 (i=
2,3,…,n),
а из непрерывности второй производной
(i=
2,3,…,n),
а из непрерывности второй производной
![]() (i=
2,3,…,n).
(i=
2,3,…,n).
Объединив
все три вида уравнений, получим систему
из 3n-2 уравнений относительно
3nнеизвестных![]() .
Два недостающих уравнения получим,
задав граничные условия для функцииS(x). Для
этого воспользуемся граничными условиями
для сплайн-функции в виде
.
Два недостающих уравнения получим,
задав граничные условия для функцииS(x). Для
этого воспользуемся граничными условиями
для сплайн-функции в виде![]() (концы
гибкой линейки свободны).
(концы
гибкой линейки свободны).
Тогда получим систему уравнений
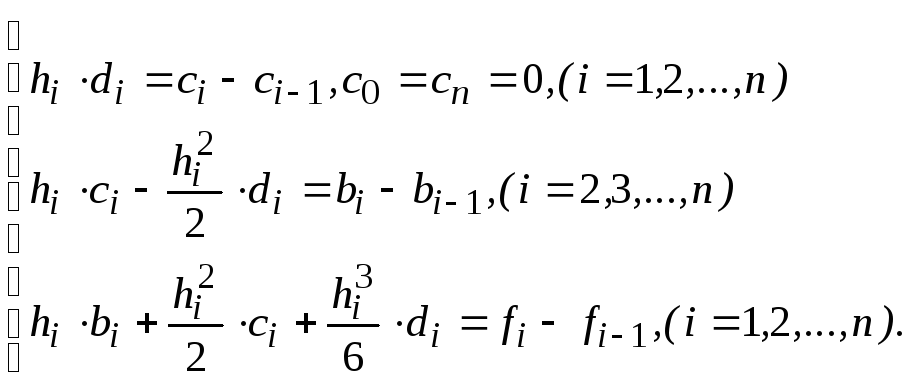 (5.9)
(5.9)
Решая систему методом подстановки (исключаем из (5.9) неизвестные bi,di), получим систему:
 (5.10)
(5.10)
(i= 1,2,…,n-1).
Система (5.10) имеет
трехдиагональную матрицу. Эта система
может быть решена методом прогонки или
Гаусса. После ее решения коэффициенты
сплайна
![]() определим через коэффициентысiс помощью явных формул
определим через коэффициентысiс помощью явных формул
![]() ,
,
![]() (i=
1,2,…,n).
(i=
1,2,…,n).
5.3.2 Сходимость процесса интерполирования кубическими сплайнами
Доказывается, что
при неограниченном увеличении числа
узлов на одном и том же отрезке
![]()
![]() .
Оценка погрешности интерполяции
.
Оценка погрешности интерполяции![]() зависит от выбора сетки и степени
гладкости функцииf(x).
зависит от выбора сетки и степени
гладкости функцииf(x).
При равномерной
сетке
![]() (i=0,1,…,n)
(i=0,1,…,n)
![]()
где
![]() .
.
Другие постановки задачи интерполирования функций.
Если функция периодическая, то используется тригонометрическая
интерполяция
с периодом l, которая
строится с помощью тригонометрического
многочлена
![]() ,
коэффициенты которого находятся из
системы
,
коэффициенты которого находятся из
системы![]() (i= 1,2,…,2n+1).
(i= 1,2,…,2n+1).
2. Выделяют приближение функций рациональными, дробно – рациональными и другими функциями. В данной книге эти вопросы не рассматриваются.