

6 Численные методы решения задачи Коши для обыкновенных дифференциальных уравнений исистем дифференциальных уравнений
Будем рассматривать задачу Коши для системы обыкновенных дифференциальных уравнений(ОДУ).Запишем систему в векторной форме
-
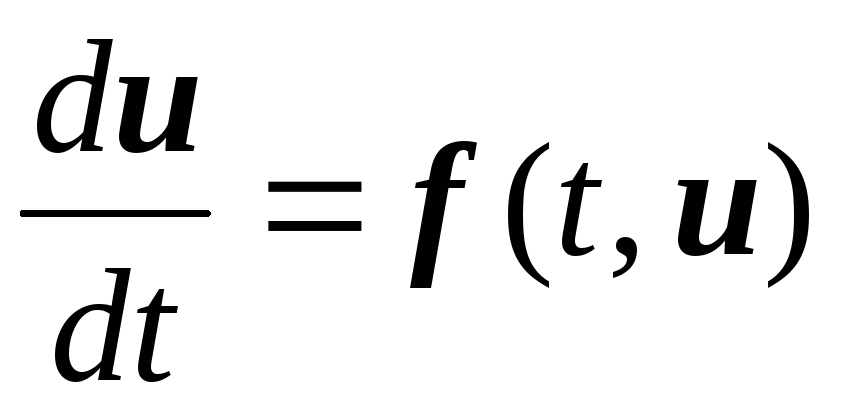 ,
,(6.1)
![]()
где:
![]() -искомая
вектор-функция;t-независимая
переменная;
-искомая
вектор-функция;t-независимая
переменная;![]() ;
;![]() ,m-порядок системы;
,m-порядок системы;![]() координаты;t0;
координаты;t0;![]() .
.
Запишем систему (6.1) в развернутом виде
-
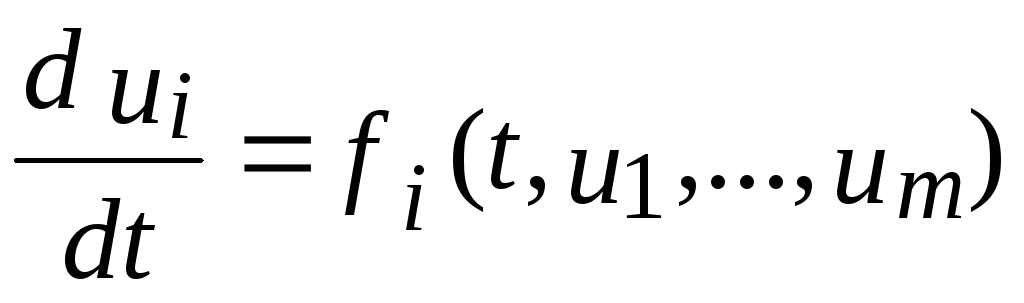 ,
,(6.2)
где:
i=1,...,m;
![]() .
.
В случае i=1 -это будет ОДУ 1-го порядка, а приi=2 - система из двух уравнений первого порядка.
В
![]() случаеi=1 решение задачи Коши предполагает
нахождение интегральной кривой,
проходящей через заданную точку и
удовлетворяющую заданному начальному
условию.
случаеi=1 решение задачи Коши предполагает
нахождение интегральной кривой,
проходящей через заданную точку и
удовлетворяющую заданному начальному
условию.
Задача состоит в том, чтобы найти искомую вектор-функцию u, удовлетворяющую (6.1) и заданным начальным условиям.
Известны условия, гарантирующие существование и единственность решения (6.1) или (6.2).
Предположим, что
функции
![]() (
(![]() )
непрерывны по всем аргументам в
некоторой замкнутой области D={t
)
непрерывны по всем аргументам в
некоторой замкнутой области D={t![]() },
где a,b-известные константы.
},
где a,b-известные константы.
Из непрерывности
функций следует их ограниченность, т.е.
функции
![]() сверху ограничены некоторой константой
М: |
сверху ограничены некоторой константой
М: |![]() |<M (где М
|<M (где М![]() 0)
всюду в области D и пусть в области D
функции
0)
всюду в области D и пусть в области D
функции![]() удовлетворяют условию Липшица по
аргументам
удовлетворяют условию Липшица по
аргументам![]() .
Это значит, что
.
Это значит, что
![]()
для
любых двух точек
![]() и
и![]() из области D. Тогда существует единственное
решение задачи (6.1)
из области D. Тогда существует единственное
решение задачи (6.1)
-
 ,определенное
при
,определенное
при

(6.3)
и принимающее при t=0 заданное начальное значение.
Существует два класса методов для решения задачи (6.1):
1) семейство одношаговых методов(Рунге-Кутта);
2) семейство многошаговых(m-шаговых) методов.
Сначала рассмотрим одношаговые методы. Для простоты возьмем одно уравнение
-
 ,
,(6.4)
где:
![]() ;t>0.
;t>0.
По оси tвведем
равномерную сетку с шагом, т.е. рассмотрим систему точек![]() .
Обозначим через
.
Обозначим через![]() точное решение (6.4) , а через
точное решение (6.4) , а через![]() приближенные значения функцийuв заданной системе точек.
приближенные значения функцийuв заданной системе точек.
6.1 Семейство одношаговых методов решения задачи Коши
6.1.1 Метод Эйлера (частный случай метода Рунге-Кутта)
Уравнение (6.4) заменяется разностным уравнением
-
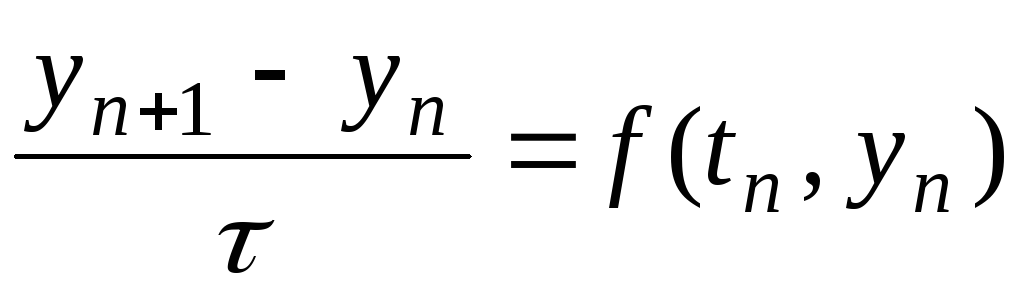 ,
n=0,1,2,…,
,
n=0,1,2,…,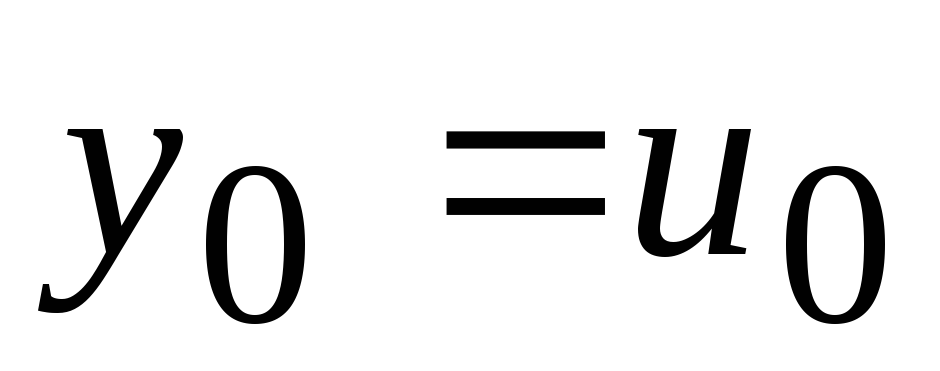 .
.
В
окончательной форме значения
![]() можно определить по явной формуле
можно определить по явной формуле
![]()
-
 .
.(6.5)
![]()
Вследствие систематического накопления ошибок метод используется редко или используется только для оценки вида интегральной кривой.
Определение 1.
Метод сходится к точному решению в
некоторой точкеt, если![]() при,
при,![]() .
.
Метод сходится на интервале (0,t], если он сходится в любой точке этого интервала.
Определение 2.
Метод имеетр-й порядок точности,
если существует такое числор>0,
для которого![]() при, где:-
шаг интегрирования;O-малая
величина порядка
при, где:-
шаг интегрирования;O-малая
величина порядка![]() .
.
Так как
![]() ,
то метод Эйлера имеет первый порядок
точности. Порядок точности метода
совпадает с порядком точности разностной
аппроксимации исходного дифференциального
уравнения.
,
то метод Эйлера имеет первый порядок
точности. Порядок точности метода
совпадает с порядком точности разностной
аппроксимации исходного дифференциального
уравнения.
6.1.2 Методы Рунге-Кутта
Метод Рунге-Кутта второго порядка точности
Отличительная особенность методов Рунге-Кутта от метода (6.5) заключается в том, что значение правой части уравнения вычисляется не только в точках сетки, но и также в середине отрезков(промежуточных точках).
Предположим, что
приближенное значение
![]() решения задачи в точке
решения задачи в точке![]() уже известно. Для нахождения
уже известно. Для нахождения![]() поступают так:
поступают так:
используют схему Эйлера в таком виде
-
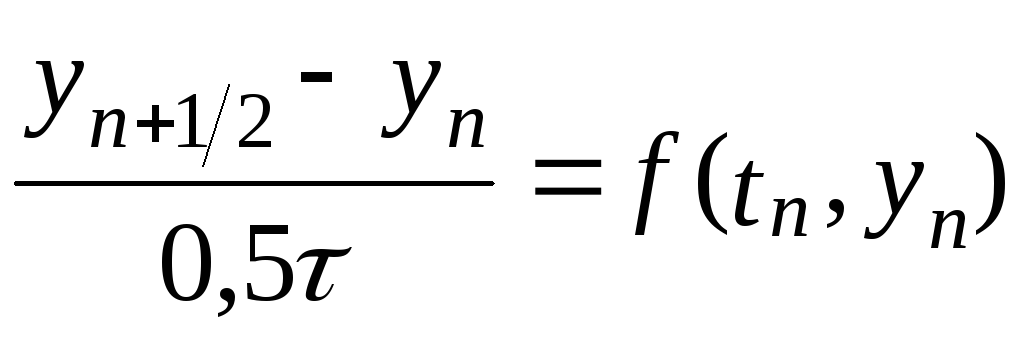
(6.6)
и
отсюда вычисляют
![]() ;
;
2) воспользуемся разностным уравнением вида
-
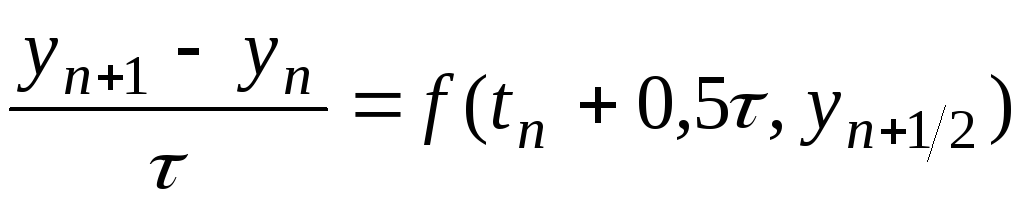 ,
,(6.7)
откуда
найдем значение
![]() .
Далее подставим значение
.
Далее подставим значение![]() в уравнение (6.7). Тогда
в уравнение (6.7). Тогда
-
 ,
,(6.8)
где
![]() .
.
Можно показать,
что метод (6.8) имеет второй порядок
точности, т.е.
![]()
![]() .
.
Метод (6.8) называется
методом прогноза и коррекции в том
смысле, что на первом этапе решение как
бы предсказывается с точностью
![]() ,
а на втором этапе - с точностью до
,
а на втором этапе - с точностью до![]() (второй
порядок точности).
(второй
порядок точности).
Будем рассматривать
явные методы. Задаем числовые коэффициенты
![]() ,
,![]() ,i=2,...,m;j=1,2,...,(m-1) и=1,2,...,m.
Последовательно вычисляем функции
,i=2,...,m;j=1,2,...,(m-1) и=1,2,...,m.
Последовательно вычисляем функции
![]() ;
;
![]() ;
;
![]() ;
;
……………………………………………..
![]() .
.
Затем из формулы
![]() находим значения
находим значения![]() .
Здесь
.
Здесь![]() ,
,![]() -числовые
параметры, которые определяются или
выбираются из соображений точности
вычислений.
-числовые
параметры, которые определяются или
выбираются из соображений точности
вычислений.
При m=1 и=1 получается метод Эйлера, приm=2 получаем семейство методов
-
 ,
,(6.9)
где:
![]() ;
;![]() ;y0=u0.
;y0=u0.
Семейство определяет
явные методы Рунге-Кутта. Подставив
нужные 1 и2, получаем
окончательную формулу. Точность этих
методов совпадает с точностью
аппроксимирующего метода и равна![]() .
.
Невязкой, или погрешностью аппроксимации метода (6.9) называется величина
![]() ,
,
полученная заменой в (6.9) приближенного решения точным решением.
При 1+2=1
получим первый порядок точности. Если
же потребовать дополнительно![]() ,
то получим методы второго порядка
точности вида
,
то получим методы второго порядка
точности вида
![]()
при
![]() .
.
Приведем один из методов Рунге-Кутта третьего порядка точности
![]() ,
,
где:
![]() ;
;![]() ;
;![]() .
.
Метод Рунге-Кутта 4-го порядка точности
![]() ,
,
где:
![]()
![]()
![]()
![]()
Методы Рунге-Кутта сходятся и порядок их точности совпадает с порядком аппроксимации разностным отношением.
Теорема. Пусть
правая часть уравнения (6.4)![]() удовлетворяет условию Липшица по
аргументу u с
константой L, и
пусть
удовлетворяет условию Липшица по
аргументу u с
константой L, и
пусть
![]() -невязка
метода Рунге-Кутта. Тогда для погрешности
метода при
-невязка
метода Рунге-Кутта. Тогда для погрешности
метода при![]() справедлива оценка
справедлива оценка
![]() ,
,
где:
![]() ;
;![]() ;
;![]() .
.
На
практике обычно пользуются правилом
Рунге. Для этого сначала проводят
вычисления с шагом
, затем -![]() .
Если
.
Если![]() -
решение при шаге,
а
-
решение при шаге,
а![]() -
при шаге
-
при шаге![]() ,
то справедлива оценка
,
то справедлива оценка![]() .
Тогда за оценку погрешности при шаге
.
Тогда за оценку погрешности при шаге![]() принимают величину
принимают величину
![]() .
.