

4.5.Рівняння криволінійного руху автопоїзда.
Рівняння криволінійного руху (повороту) веденої ланки автопоїзда називається залежність між його кутовими швидкостями.
![]() де
де
![]() -кут
повороту повздовжньої осі причіпа.
-кут
повороту повздовжньої осі причіпа.
Продиференцювавши це рівняння отримаємо
![]() де
де
![]() -
кутова швидкість повороту ведучої
ланки.
-
кутова швидкість повороту ведучої
ланки.
![]() -
кутова швидкість повороту веденої
ланки.
-
кутова швидкість повороту веденої
ланки.
Звідси
![]()
В загальному виді для і-ї ланки автопоїзду любої структури рівняння повороту матиме вигляд
![]() де
де
![]() -
кут складання і-ї ланки, тобто кут між
повздовжніми осями і-ї та (і-1) ланок
-
кут складання і-ї ланки, тобто кут між
повздовжніми осями і-ї та (і-1) ланок
![]() -абсолютна
кутова швидкість повороту і-ї та (і-1)-ї
ланок.
-абсолютна
кутова швидкість повороту і-ї та (і-1)-ї
ланок.
Криволінійний рух автопоїзда, який має у своєму складі п ведених ланок описується системою диференціальних рівнянь:
![]()
Система
загальна, її рішення дає можливість
визначити кути складання ланок
в залежності від геометричних (
![]()
![]() )
і конструктивних (
)
і конструктивних (![]() )
параметрів автопоїзду, а також від
експлуатаційних режимів криволінійного
руху
.
)
параметрів автопоїзду, а також від
експлуатаційних режимів криволінійного
руху
.
Розглянемо рух двохосного автомобіля, що експлуатується з одноосним причіпом з керованими колесами.
Якщо
приведений кут повороту
![]() керованих коліс збільшується, а радіус
кривизни основної траекторії зменшується
то миттєвий центр
лежить на продовженні лінії що поєднує
центр
з точкою зчеплення
.
Тоді
керованих коліс збільшується, а радіус
кривизни основної траекторії зменшується
то миттєвий центр
лежить на продовженні лінії що поєднує
центр
з точкою зчеплення
.
Тоді
 звідки
звідки
Якщо
центри
та
співпадають, тобто якщо
дорівнюватиме
,
то рух причіпа до центру повороту
припиниться , так як у цьому випадку
![]() то і
то і
![]() ,
тобто автомобіль та причіп обертаються
як одно ціле навколо єдиного миттєвого
центру з одинаковою кутовою швидкістю.
,
тобто автомобіль та причіп обертаються
як одно ціле навколо єдиного миттєвого
центру з одинаковою кутовою швидкістю.
Практично
обертання навколо центру починається
після повороту автомобіля-тягача на
![]()
Згідно схеми отримаємо
![]()

Відношення цих двох радіусів дорівнює

Підставивши ці значення у диференціальне рівняння та маючи на увазі, що
![]() ,
отримаємо наступне розгорнуте
диференціальне рівняння повороту
автопоїзду
,
отримаємо наступне розгорнуте
диференціальне рівняння повороту
автопоїзду

Для автопоїзду з
веденою ланкою першого роду, коли
![]() рівняння повороту
рівняння повороту
![]()
Для сідельного
автопоїзда без керованих коліс коли
![]() та
рівняння
повороту
та
рівняння
повороту
![]()
Приводячи диференціальні рівняння до наближеного виду та допускаючи, що косинуси дорівнюють одиниці, а синус та тангенс дорівнюють аргументу, отримаємо розгорнуте диференціальне рівняння
![]()
Інтегрування вище наведеного рівняння виконується в наступних інтервалах:
Вхідна перехідна траєкторія автомобіля –тягача.
![]() від
від
![]() до
до
![]() .
.
Колова траєкторія автомобіля-тягача
![]() від
до
від
до
![]()
Вихідна перехідна траєкторія
![]() до
до
![]()
Прямолінійна траєкторія
 до
до
 де
де
![]() -момент часу
відповідній закінченню повороту
керованих коліс.
-момент часу
відповідній закінченню повороту
керованих коліс.
![]() -
момент часу відповідний закінченню
колового руху автомобіля-тягача.
-
момент часу відповідний закінченню
колового руху автомобіля-тягача.
![]() -момент
часу , відповідний закінченню повороту
керованих коліс автомобіля-тягача в
нейтральне положення.
-момент
часу , відповідний закінченню повороту
керованих коліс автомобіля-тягача в
нейтральне положення.
Якщо прийняти наступні позначення :
![]()
![]()
![]() і
і
![]() то диференціальне рівняння у
то диференціальне рівняння у
всіх інтервалах руху автопоїзда отримає наступний вид:
1. Вхідна
траєкторія -![]() .
.
2. Колова
траєкторія -![]()
3. Вихідна
перехідна траєкторія -
![]()
4. Прямолінійна
траєкторія -
![]()
Загальний інтеграл лінійних рівнянь першого порядку матиме вигляд:
![]() де
де
А- права частина останніх чотирьох рівнянь.
На кожній
стадії криволінійного руху є один
незалежний параметр, відносно котрого
проходить зміна кута
.
Цей параметр показаний в таблиці заданим
і наведений у другому стовпчику таблиці.
Для вхідної та вихідної перехідних
траєкторій заданим параметром є кут
,
для колової траєкторії - центральний
кут
колової траєкторії і для вихідного
прямолінійного руху – пройдений тягачем
шлях
![]() від точки виходу на пряму траєкторію.
від точки виходу на пряму траєкторію.
Граничні значення зміни заданих параметрів:
1. На вхідній
траєкторії ……………………………… від 0
до
![]() .
.
2. На коловій траєкторії……………………………… від 0 до .
3. На вихідній перехідній траєкторії………………… від до 0.
4. На вихідній
прямолінійній ………………………… від 0 до
![]() .
.
Таблиця визначення кута для всіх стадій криволінійного руху.
Траек-торія криво- ліній- ного руху |
За-да-ний па-ра-метр
|
Тип причіпної ланки |
||
Одноосний причіп |
Напівпричіп |
Причіпна секція зчлено- ваного автобуса |
||
|
|
|
||
Вхідна |
|
|
|
|
Коло-ва |
|
|
|
|
Вихід-на пере-хідна |
|
|
|
|
Вихід-на прямо- ліній-на |
|
|
|
|





Примітка: Так як режими руху при вході в криволінійний рух та при виході з нього можуть бути різними, то режимні коефіцієнти мають позначення з одним штрихом на вході та з двома штрихами на виході з криволінійного руху. За звичай при розрахунках коефіцієнт приймається однаковий для входу та виходу з криволінійного руху.
Отримані розрахункові формули дозволяють визначити положення веденої ланки по величині кута складання , якщо відома та попередньо побудована основна траєкторія криволінійного руху тягача.

Рис 13. Побудова смуги руху тягача з напівпричепом при повороту під прямим кутом.
Розташування причіпних ланок на повороті може визначатися графоаналітичним методом.

Рис 14. Схеми графічної побудови траєкторій руху напівпричепів.
А)-з некерованими колесами( ). Б)- з керованими колесами ( ).
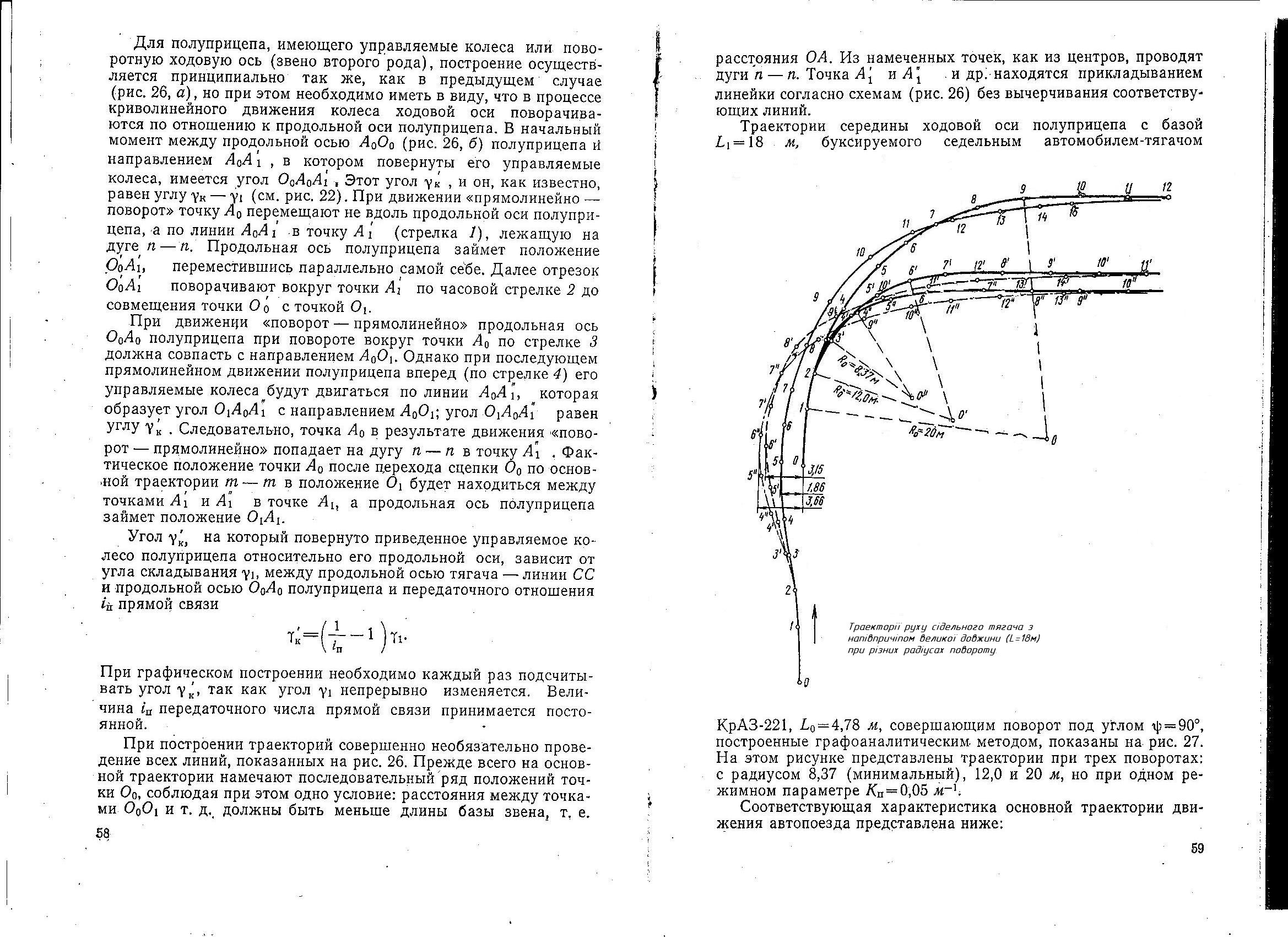
Рис 15. Траєкторії руху сідельного тягача з напівпричепом великої довжини (L=18м) при різних радіусах повороту.