

Ємнісні датчики
Принцип дії ємнісних вимірювальних перетворювачів ґрунтується на зміні ємності конденсатора під впливом вхідної величини, що перетворюється. Ємність конденсатора
![]()
де - відносна діелектрична проникність діелектрика; 0 – діелектрична
проникність вакууму; S – площа пластини; δ – товщина діелектрика або
відстань між пластинами.
З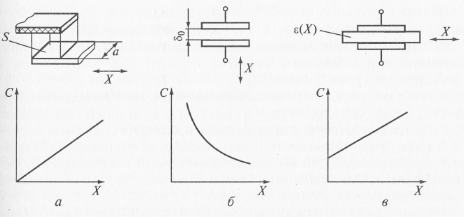 наведеного співвідношення видно, що на
ємність конденсаторів можна впливати
зміною площі перекриття пластин S
(рис. 4.14,а),
відстані між ними δ (рис. 4.14,б),
діелектричної проникності ε речовини,
що знаходиться в зазорі між обкладинками
конденсатора (рис. 4.14,в).
Вибір того чи іншого змінного параметра
залежить від характеру вимірюваної
величини.
наведеного співвідношення видно, що на
ємність конденсаторів можна впливати
зміною площі перекриття пластин S
(рис. 4.14,а),
відстані між ними δ (рис. 4.14,б),
діелектричної проникності ε речовини,
що знаходиться в зазорі між обкладинками
конденсатора (рис. 4.14,в).
Вибір того чи іншого змінного параметра
залежить від характеру вимірюваної
величини.
а – зміна площі перекриття пластин; б – зміна відстані між пластинами;
в – зміна діелектричної проникності
Рисунок 4.14 – Схеми та характеристики ємнісних перетворювачів
Ємнісні перетворювачі використовують для вимірювання кутових і лінійних переміщень, лінійних розмірів, рівня, зусиль, вологості, концентрації та ін. Конструктивно вони можуть бути виконані з плоскими паралельними, циліндричними, штирьовим електродами, з діелектриком між пластинами і без нього.
Ємнісний вимірювальний перетворювач з плоскими пластинами та зі змінною площею перекриття S (див. рис. 4.14,а) описується рівнянням перетворення
![]() (4.12)
(4.12)
де а – ширина пластин конденсатора; Х – довжина перекриття електродів.
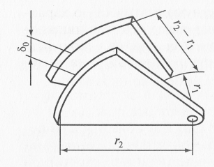
Рисунок 4.15 – Ємнісний датчик для вимірювання кутових величин
Ємнісні перетворювачі переміщення зі змінною площею перекриття (рис. 4.15) використовують і для вимірювання кутових величин. У цьому випадку ємність вимірювального перетворювача
![]() (4.13)
(4.13)
а чутливість
![]()
де r1, r2 – відповідно зовнішній та внутрішній радіуси пластин; , 0 –
відповідно поточний (вимірюваний) та початковий кути перекриття пластин.
З виразів (4.12) і (4.13) видно, що всі величини в них, крім вимірюваних Х або φ, постійні, тобто статична характеристика такого ємнісного датчика лінійна (див. рис. 4.14,а). Перетворювачі такого типу застосовують для вимірювання порівняно великих (до десятків сантиметрів) переміщень.
Ємнісний плоский перетворювач переміщення із змінним повітряним зазором (див. рис. 4.14,б) має нелінійну характеристику. Зміна його ємності описується рівнянням
![]()
де δ – початковий зазор; Х – переміщення пластини.
У зв'язку з нелінійністю статичної характеристики такі датчики застосовують для вимірювання відносно малих переміщень, зазвичай не більше 0,1δ0.
Перетворювачі зі змінною діелектричною проникністю середовища ε між електродами (див. рис. 4.14, в) широко використовують для вимірювання рівня рідких і сипучих речовин, аналізу складу й концентрації речовин у хімічній, нафтопереробній та інших галузях промисловості, для рахування виробів, охоронної сигналізації та т.п. Вони мають лінійну статичну характеристику.
Для підвищення чутливості і лінійності характеристик використовують диференціальні перетворювачі, у яких зміна стану контрольованої величини призводить до зміни ємності одночасно двох чутливих елементів, що включаються в різні плечі мостовий вимірювальної схеми. У цьому разі отримують реверсивну (двотактну) статичну характеристику. При зміні напрямку переміщення рухомого елементу вихідний сигнал перетворювача змінює свою фазу на 180 ° по відношенню до фази напруги живлення датчика, який є опорною напругою.
Ємність вимірювальних перетворювачів у залежності від конструктивних особливостей коливається від десятих часток до декількох тисяч пікофарад, що призводить до необхідності використовувати для живлення датчиків напруга підвищеної частоти – від 103 до 108 Гц. Це один із суттєвих недоліків подібних перетворювачів.
Початкова ємність перетворювача тим більше, чим менше зазор δ між електродами. Однак зменшення зазору обмежується діелектричної міцністю міжелектродного середовища (для повітря, наприклад, напруженість електричного поля не повинна перевищувати 105 В/м) і наявністю сили електростатичного притягання пластин F = - (1 / 2) U 2 (εε0S/δ2).
Похибки ємнісних перетворювачів в основному визначаються впливом температури і вологості на геометричні розміри і діелектричну проникність середовища. Зменшити похибки можна, використовуючи конструкційні матеріали з малим температурним коефіцієнтом лінійного розширення, або за допомогою герметизації датчиків.
До достоїнств ємнісних вимірювальних перетворювачів можна віднести простоту конструкції, малі розміри і масу, високу чутливість, велику роздільну здатність при малому рівні вхідного сигналу, відсутність рухомих струмознімальних контактів, високу швидкодію, можливість отримання необхідного закону перетворення за рахунок вибору відповідних конструктивних параметрів, відсутність впливу вихідного ланцюга на вимірювальний.
Недоліки ємнісних вимірювальних перетворювачів полягають у відносно низькому рівні вихідної потужності сигналів, нестабільності характеристик при зміні параметрів навколишнього середовища, впливі паразитних ємностей.