

Типові способи вимірювання технологічних параметрів
Там, де використовуються високі потужності, наприклад в комутуючому обладнанні, електродвигунах, трансформаторах, що характерно для технологічного обладнання багатьох процесів, необхідно здійснювати гальванічну розв'язку вимірювальних ланцюгів датчиків від силових ланцюгів. Простішим розділяючим елементом, що забезпечує таку гальванічну розв'язку, можна вважати електромагнітне реле. Найбільш сучасним рішенням завдання гальванічної розв'язки є реалізація цієї розв'язки на парі світлодіод-фототранзистор. Такого роду поєднання називається трансоптором, або оптроном.
Щоб датчики можна було практично використовувати для підключення до систем автоматизації виробничих процесів, зазвичай використовуються три вимірювальні схеми: мостова, диференціальна та компенсаційна.
 Мостова
вимірювальна схема,
яка існує у двох різновидах (балансної
і небалансної) зображена на рисунку
4.33.
Мостова
вимірювальна схема,
яка існує у двох різновидах (балансної
і небалансної) зображена на рисунку
4.33.
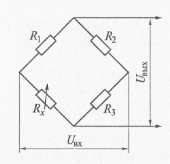
Рисунок 4.33 - Мостова вимірювальна схема
На рисунку 4.33 в протилежних ділянках ланцюгів вимірювальної схеми, званих плечима моста, розміщуються еталонні опори R1, R2, R3, а також вимірюваний опір Rx. Для рівноваги моста необхідно, щоб добутки величин опорів, встановлених в протилежних плечах вимірювального моста, були рівні між собою.
При дотриманні умов рівноваги вимірювального моста напруга на його вихідній діагоналі буде відсутньою, тобто Uвих = 0. При зміні вимірюваного опору Rx умови рівноваги вимірювального моста будуть порушуватися, і на цій діагоналі з'явиться відповідний електричний сигнал.
Підвищення точності відліку можна досягти, змінюючи опір R1 і R3, що знаходяться в сусідніх плечах вимірювального моста, таким чином, щоб не дивлячись на зміни вимірюваного опору Rx звести до нуля зміни вихідної напруги. Факт рівності нулю вихідної напруги фіксується за допомогою встановленого в вихідній діагоналі вимірювального моста приладу або пристрою, званого нуль-індикатором. Використання нуль-індикатора дозволяє з більшою точністю «ловити» момент рівності нулю вихідної напруги.
 Для
вимірювання ємнісного опору зазвичай
використовується диференційна
схема.
Така схема також існує у двох варіантах.
За першим варіантом диференціальної
схеми, зображеному на рисунку 3.34, а,
як еталонний опір 4,
так і вимірюваний ємнісне опір 1
включаються в електричні контури, що
симетрично живляться змінною напругою
від трансформатора 2.
При рівності еталонного 4
і вимірюваного 1
ємнісного опорів протилежно спрямовані
струми в цих контурах (І2
і І1),
будуть рівними за величиною, так що
результуючий струм через вимірювальний
прилад 3
виявляється рівним нулю, оскільки цей
струм представляє собою різниця струмів
І2
і І1.
Саме тому схема називається диференційною.
При зміні величини вимірюваного ємнісного
опору покази приладу 3
будуть відрізнятися від нуля і відображати
ці змі
Для
вимірювання ємнісного опору зазвичай
використовується диференційна
схема.
Така схема також існує у двох варіантах.
За першим варіантом диференціальної
схеми, зображеному на рисунку 3.34, а,
як еталонний опір 4,
так і вимірюваний ємнісне опір 1
включаються в електричні контури, що
симетрично живляться змінною напругою
від трансформатора 2.
При рівності еталонного 4
і вимірюваного 1
ємнісного опорів протилежно спрямовані
струми в цих контурах (І2
і І1),
будуть рівними за величиною, так що
результуючий струм через вимірювальний
прилад 3
виявляється рівним нулю, оскільки цей
струм представляє собою різниця струмів
І2
і І1.
Саме тому схема називається диференційною.
При зміні величини вимірюваного ємнісного
опору покази приладу 3
будуть відрізнятися від нуля і відображати
ці змі
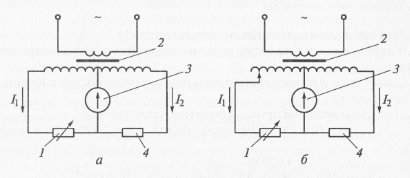
а - з вимірюванням різниці струмів;; б - зі зміною ЕРС у вторинній обмотці;
1 – вимірюваний опір; 2 - трансформатор; 3 - вимірювальний прилад (для схеми а) або нуль-індикатор (для схеми б); 4 - еталонний опір
Рисунок 4.34 – Диференційні схеми вимірювання опорів
Інший варіант вимірювання ємнісного опору за допомогою диференціальної схеми наведений на рисунку 4.34, б. Тут також відбувається віднімання струмів І2 і І1, але зміна вимірюваного ємнісного опору 1 компенсується зміною напруги, що знімається з вторинної обмотки трансформатора 2, так що струм через вимірювальний прилад 3 залишається рівним нулю. Величина Е, на яку потрібно змінити напругу Е вихідної обмотки трансформатора, однозначно визначає величину зміни вимірюваного ємнісного опору.
Прирівнювання до нуля струму через вимірювальний прилад дозволяє використовувати його як нуль-індикатор, що підвищує точність вимірювань.
Для вимірювання сигналу від генераторних датчиків застосовується компенсаційна схема. Суть її роботи полягає в тому, що підбирається значення ЕРС взірцевого джерела, рівне ЕРС, що генерується датчиком. Факт рівності ЕРС визначається за відсутності струму у відповідному контурі. Факт ж відсутності струму в контурі визначається за показаннями приладу, що є нуль-індикатором. При цьому не потрібно вимірювати абсолютну величину струму, а потрібно лише визначити факт рівності цього струму нулю. Цим і обумовлена висока чутливість і точність компенсаційної схеми.