

4.3.2.2 Асинхронні тахогенератори
Асинхронні тахогенератора за своєю конструкцією не відрізняються від двофазних асинхронних виконавчих двигунів з порожнистий немагнітним ротором. Так само як і двигуни, вони мають на статорі дві фазні обмотки, осі яких зміщені в просторі відносно одна одної на кут 90°. Одна з них В (мал. 4.21, а) підключається до мережі і називається обмоткою збудження. З іншої обмотки Г знімається вихідна напруга тахогенератора. Ця обмотка називається вихідний, або генераторної.
Залежно від місця розташування обмоток розрізняють три конструктивні форми асинхронних тахогенератора:
з обмотками тільки на зовнішньому статорі;
з обмотками тільки на внутрішньому статорі;
з одною обмоткою на зовнішньому статорі і одною - зазвичай обмоткою збудження - на внутрішньому.
Порожнистий ротор асинхронного тахогенератора на відміну від ротора виконавчого двигуна, з метою забезпечення великого активного опору, що мало змінюється при зміні температури, виконується (в точних тахогенераторах) з константану, спеціального манганіну, фосфористої або марганцевистої бронзи і т. п.
Розглянемо спочатку фізичні процеси, що протікають в асинхронному тахогенератора при n = 0.
При нерухомому роторі (n = 0) струм обмотки збудження створює пульсуючий по подовжній осі d магнітний потік ΦdS, який, пронизуючи ротор, наводить у ньому ЕРС трансформації (див. рис. 4.20, а). Контури струмів ротора від ЕРС трансформації розташовуються в площинах, перпендикулярних поздовжній осі d - осі потоку збудження ΦdS. Ці струми створюють магнітний потік ротора ΦdR, спрямований назустріч потоку збудження ΦdS, який, як в будь-якому трансформаторі, компенсується зростаючим струмом первинної – обмотки збудження.
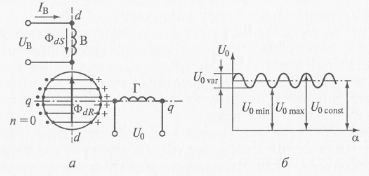
а – контури струмів та магнітні потоки;
б – залежність нульового напругт від положення ротору
Рисунок 4.20 – Асинхронний тахогенератор при n = 0
Теоретично при нерухомому роторі (п = 0) в тахогенераторе магнітний потік є тільки по подовжній осі - осі обмотки збудження, тому в генераторної обмотці, вісь якої зміщена на 90° до осі обмотки збудження, ніяких ЕРС наводитися не повинно. Проте у всіх тахогенератора і при п = 0 на затискачах генераторної обмотки є деяка незначна напруга, яка називається нульовою або залишковою.
Нульова напруга U0 - напруга при п = 0 - явище вельми небажане. Причини його виникнення дуже різноманітні:
а) неточний зсув обмоток;
б) асиметрія магнітного ланцюга з-за різної провідності стали уздовж і впоперек прокату, наявності короткозамкнених контурів, нерівномірності повітряного зазору;
в) наявність потоків розсіювання;
г) наявність ємнісних зв'язків між обмотками, особливо відчутних в тахогенераторах з підвищеною частотою живлячої напруги;
д) асиметрія полого ротора і т.п.
Більшість зазначених причин призводять до того, що в тахогенератора при п = 0 з'являється поперечна складова магнітного потоку, яка наводить ЕРС Е0 в генераторної обмотці.
Значення нульової напруги U0 не залишається постійним при повороті ротора (рис. 4.20, б). Його можна розділити на постійну U0const і змінну U0var складові.
Постійна складова U0const, зумовлена причинами, вказаними раніше у пунктах «а ... г», і у більшості тахогенераторів знаходиться в межах від 25 до 100 мВ.
Змінна складова U0var = U0max - U0min (див. рис. 4.20, б) залежить в основному від товщини, тобто неоднаковою електричної провідності полого ротора в різних напрямках (від його асиметрії). Вона зазвичай складає 3…7 мВ.
Для боротьби з постійною складовою нульової напруги дуже часто обмотки збудження і генераторну розміщують на різних статорах: одну - на внутрішньому, іншу - на зовнішньому. При збірці тахогенератора внутрішній статор повертають відносного зовнішнього, знаходять положення, відповідне U0min, і в цьому положенні фіксують.
З метою боротьби зі змінною складовою небажаної нульової напруги ретельно обробляють і калібрують ротор, домагаючись його максимальної симетрії в електричному відношенні. До зменшення змінної складової залишкової напруги веде збільшення числа p пар полюсів обмоток статора. Зазвичай здійснюється 2р > 4.
При обертанні ротора (n 0) його «волокна» - елементарні провідники перетинають магнітний потік збудження ФdS , і в них, крім ЕРС трансформації, наводиться ще ЕРС обертання (різання). Під дією ЕРС обертання по ротору протікають струми, контури яких при великому активному опорі ротора практично збігаються з віссю потоку збудження ФdS (рис. 4.21). Ці струми створюють свій магнітний потік ротора ФqR, який спрямований вздовж поперечної осі q тахогенератора. Потік ФqR, зчеплений з витками генераторної обмотки Г, наводить у них ЕРС ЕГ – вихідну ЕРС тахогенератора. Частота цієї ЕРС дорівнює частоті мережі. Дійсно, оскільки ЕГ = ωГ(dФqR/dt), то її частота дорівнює частоті зміни потоку ФqR, що викликається струмами від ЕРС обертання. Частота ЕРС обертання при n = const дорівнює частоті зміни в часі потоку ФdS, яким вона наводиться: Eвр ~ ФdSn; таким чином, частота зміни ЕГ в часі дорівнює частоті живильної мережі – напруги UB.