

1, 2, 2`, 3`, 1А…1д – контакти; 3 – вимірювальний щуп; 4 - пружина
Рисунок 4.2 – Основні типи контактних датчиків
збільшується (виріб И2), то вимірювальний щуп 3 переміщується вгору, у результаті чого контакти 1 і 2 приходять в зіткнення. При цьому активний опір
між контактами 1 і 2 змінюється від нескінченності до мізерно малого значення, яке визначається контактним опором. Висновки датчика підключаються до сигнального пристрою. Пружина 4 з'єднує вимірювальний щуп 3 з одною з вихідних клем.
На рисунку 42,б зображено двограничний контактний датчик - з двома парами контактів, здатний реагувати на переміщення щупа в обидві сторони від початкового (нульового) положення. Подібні датчики широко використовуються для автоматичного контролю розмірів деталей і підрахунку кількості продукції, що випускається.
Багатограничний контактний датчик з кількома парами контактів показано на рисунку 4.2, в. Його контакти 1, 2' і 3' замикаються послідовно один за одним в залежності від розмірів деталей.
Іноді контактні датчики можуть працювати або на замикання (розмикання) всього ланцюга, або на замикання частини одного з опорів резистора R ланцюга (рис. 4.2,г).
Потенціометричні датчики
Вимірювальні перетворювачі, виконані у вигляді реостата, рухливий контакт якого переміщується під впливом вхідної вимірюваної величини, називаються реостатними вимірювальними перетворювачами. Найчастіше реостатних ВΠ включаються у вимірювальну ланцюг по схемі потенціометра, тому в ряді джерел використовується термін «потенціометричні перетворювачі».
Вихідною величиною ВΠ є електричний опір, функціонально пов'язаний зі становищем рухомого контакту. Реостатних перетворювачі служать для перетворення кутових або лінійних переміщень у відповідну зміну опору, струму або напруги. Так як у переміщення можуть бути перетворені багато неелектричних величин (тиск, витрата, рівень і ін.), то реостатні перетворювачі дуже часто використовують як проміжні перетворювачі неелектричних величин в електричні.
Залежно від матеріалу чутливого елемента реостатних перетворювачі поділяються на дротяні і недротяні.
У пристроях автоматики широко застосовують дротові реостатні перетворювачі, які відрізняються високою точністю і стабільністю функції перетворення, мають малий перехідний опір, низький рівень власних шумів, малий температурний коефіцієнт опору (ТКО). До їх недоліків відносяться низька роздільна здатність, порівняно невисокій опір (до десятків кОм), обмежена можливість застосування на змінному струмі, зумовлена залишковими індуктивністю і ємністю намотки.
Залежно від конструктивного виконання розрізняють реостатні перетворювачі з поступальним і обертальним переміщенням рухомого контакту. Останні, крім того, діляться на одно- і багатооборотні.
Конструктивно реостатні перетворювачі (рис. 4.3,а,б) складаються з каркаса 1, обмотки з ізольованого проводу 2 і струмознімального контакту 3 в вигляді щітки або движка, який ковзає по витках дроту, очищеного від ізоляції.
Каркас виконується з ізоляційного матеріалу і може мати форму стрижня, кільця, зігнутої пластини. Матеріал каркаса повинен зберігати свої розміри в широкому температурному діапазоні, умовах підвищеної вологості та хімічної забрудненості атмосфери. Крім того, каркаси повинні володіти високою теплопровідністю, що дозволяє збільшити розсіювання в перетворювачі потужністі. У якості ізоляційного матеріалу використовують гетинакс, текстоліт, кераміку або метал, покритий непровідним шаром оксиду.
Обмотку виконують ізольованим проводом виток до витка або з заданим кроком lш. Матеріал обмотки повинен відповідати тупним вимогам:
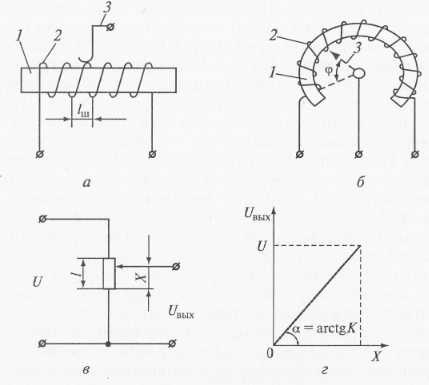
а – лінійний; б – кутовий; в – схема включення; г – статична характеристика
1 – каркас; 2 – провід; 3 – струмознімальний контакт
Рисунок 4.3 – Потенціометричні датчики
високий питомий електричний опір, висока корозійна стійкість, стабільність характеристик у часі, малий ТКО, велика міцність на розрив і стирання. Як обмотувального проводи застосовують константан і манганін, а при роботі в умовах підвищених температур – залізо- та нікельхромові сплави. В особливо відповідальних або специфічних умовах роботи застосовують сплави з благородних металів: платини з іридієм, платини з паладієм та ін. Наприклад, добавка іридію до платині збільшує її твердість, зносостійкість, хімічну стійкість, корозійну стійкість. Діаметр дроту залежить від точності і опору перетворювача: 0,01 ... 0,10 мм для датчиків високого класу; 0,1 ... 0,4 мм - для датчиків низького класу. Обмотувальний провід покривають шаром емалі або шаром оксидів.
Рухомий контакт (щітка, движок) виконують у вигляді двох-трьох паралельних зволікань діаметром 0,1 ... 0,2 мм, дещо відрізняються за довжиною (для прецизійних реостатних перетворювачів), або із спеціально профільованою пластини з розрізами. Ширина контактної поверхні щітки повинна бути рівна двом-трьом діаметрам дроту чутливого елемента.
Виготовляють щітку або з чистих металів (платини, срібла), або із сплавів (платини з іридієм або берилієм, фосфористої бронзи та ін.). Матеріал щітки має бути дещо м'якше матеріалу дроту, щоб дроти не перетиралися. Щітка притискається до обмотці з зусиллям (0,5 ... 15,0) · 10-2 Н.
Допустима щільність струму в обмотці залежить від матеріалу провода й умов його охолодження. При використанні манганіну або константану робоча температура перетворювача може досягати 40 ... 50 °С при щільності струму в обмотці близько 10 А/мм2 для каркаса з пластикових матеріалів або 25 ... 30 А/мм2 для металевого каркаса. Використання обмотувального дроти з благородних матеріалів допускає робочу температуру в межах 70 ... 80 °С і щільність струму 40 ... 50 А/мм2 при металевому каркасі.
До зажимів обмотки реостата підключається напруга U постійного або змінного струму незмінного значення. При переміщенні движка вихідна напруга UBИX змінюється пропорційно вхідний величиною X. Таким чином здійснюється перетворення переміщення в напругу (рис. 4.4,в). Враховуючи, що за конструктивними особливостями R пропорційне l, r – Х, де R - повний опір перетворювача; l - довжина намотування обмотки; r - опір частини обмотки, що припадає на переміщення X движка реостата, функція перетворення буде мати вигляд
UВИХ = (U/R)r = (U/l)X = RX ,
де К – коефіцієнт перетворення.
Для перетворювача кутового переміщення в режимі холостого ходу функції перетворення UВИХ = Κφ, де φ - кут повороту движка від нульового положення (див. рис. 4.3,б).
Аналіз отриманих виражене для функцій перетворення показує, що статична характеристика лінійних потенціометрів за відсутності навантаження являє собою пряму, що проходить через початок координат під кутом α = arctg К (рис. 4.3, г).
Як випливає з наведеної статичної характеристики, розглянуті перетворювачі відносяться до однотактний елементів, тобто вони не реагують на знак вхідного сигналу. У ряді випадків необхідні перетворювачі, що враховують знак вхідного сигналу, - двотактні вимірювальні перетворювачі. Їх можна побудувати на основі однотактних потенціометричних перетворювачів, якщо знімати вихідний сигнал з движка і середньої точки потенціометру або з діагоналі мостового кола, утвореного двома потенціометричними датчиками з середньою точкою. Два можливі варіанти включення потенціометричних датчиків за двотактною схемою наведені на рис. 4.4,а,б. Їх статичні характеристики відповідно 1 і 2 (рис. 4.4,в) мають різну крутизну. Це пояснюється тим, що при включення перетворювача мостовою схемою (див. рис. 4.4, б), зміна вхідного сигналу відробляється двома движками, які
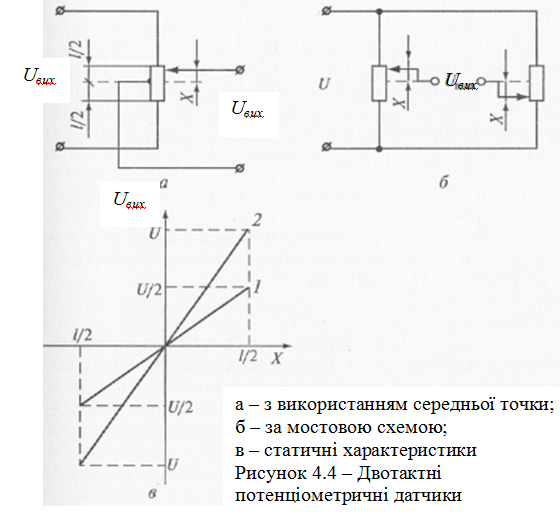
зміщуються в різні сторони від середньої точки, що призводить до появи подвоєної вихідної напруги в порівнянні зі схемою, поданою на рис. 4.4, а.
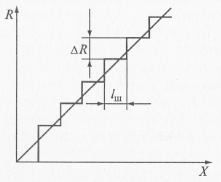
Реальні характеристики реостатних перетворювачів значно відрізняються від розглянутих ідеальних з-за різних похибок: дискретності вихідного опору; відхилення функції перетворення від розрахункової, викликаного мінливістю діаметра намотувального проводу і його питомого електричного опору; зміни температури перетворювача; впливу опору навантаження та інших чинників.
При переміщенні движка опір включеної частини потенціометра змінюється дискретно з кроком, рівним опору одного витка
R = R/w ,
де R - опір реостата; w - число витків обмотки.
Відповідно змінюється і вихідна напруга. Це явище визначає два чинники: поріг чутливості і зону нечутливості. Якщо їх розглядати щодо вхідного переміщення, то чисельно вони будуть рівні діаметру проводу обмотки типу «виток до витка» або кроці намотування lш при розташуванні витків з зазором.
 Статична
характеристика з урахуванням дискретності
зміни опору має ступінчастий вигляд
(рис. 4.5).
Якщо за ідеальну характеристику прийняти
пряму, що проходить через середини
сходинок, то абсолютна похибка
Статична
характеристика з урахуванням дискретності
зміни опору має ступінчастий вигляд
(рис. 4.5).
Якщо за ідеальну характеристику прийняти
пряму, що проходить через середини
сходинок, то абсолютна похибка
Рисунок 4.5 – Статична характеристика з урахуванням дискретності опору
дискретності чи зона нечутливості в залежності від форми представлення характеристики (у функції опору, переміщення або напруги) буде визначатися виразами
![]()
Відповідно вирази для відносних похибок приймають вигляд:
![]()
У реальних конструкціях лінійних реостатних перетворювачів число витків становить близько 2000 (мінімально близько 200), а похибка дискретності відповідно дорівнює 0,02 ... 0,03%. Сумарна похибка, викликана мінливістю електричних параметрів перетворювача, досягає 0,03 ... 0,10%. Температурна похибка, яка визначається перш за все ТКО намотувального дроту, не перевищує звичайно 0,1% на 10 °С.
Найбільшу похибку може обумовити неправильно вибраний режим роботи перетворювача - малий опір навантаження. Реостатних перетворювач з підключеним навантаженням RH (рис. 4.6,а) можна представити еквівалентною схемою (рис. 4.6,б) ненавантаженого перетворювача. Для неї справедливі наступні співвідношення

Підстановка другого виразу в першій дає
 (4.1)
(4.1)
Як можна бачити з останнього співвідношення, статична характеристика Uвих = f(r) залежить від опору навантаження і визначає методичну похибку.
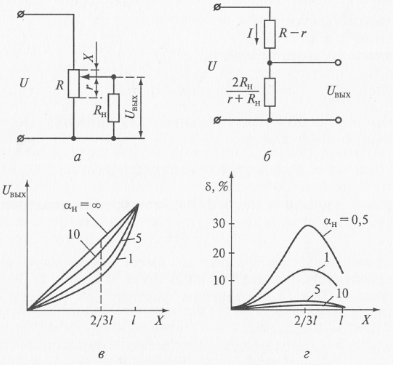
а – схема включення; б – еквівалентна схема; в – статичні характеристики;
г – графіки погрішностей
Рисунок 4.6 – Вплив навантаження на характеристику датчика
Суттєве значення має відношення R/RH. Доцільно розглянути два випадки: R/RH >> R та RН – сумірно з R.
Для R/RH >> R отримаємо з (4.1):
Uвих = (U/R)r = UвихО.
Цей результат відповідає режиму холостого ходу, тобто відсітності навантаження датчика.
Для RH R абсолютна погрішність від розбіжності ідеальної і реальної характеристик визначається виразом

Останнє отримано при умові R2r Rr2, (R2r - Rr2) 0.
Тепер знаходимо відносну погрішність
![]() (4.2)
(4.2)
Для
визначення максимальної похибки
прирівняємо
![]()
![]() до
нуля:
до
нуля:
![]()
Що справедливо при умові 2rR – 3r2 = 0, звідки маємо:
![]() (4.3)
(4.3)
Отже, перетворювач має найбільшу похибку при відхиленні движка на 2/3 загальної довжини l. Підставивши вираз (4.3) в (4.2), отримаємо формулу для розрахунку максимальної похибки
![]() (4.4)
(4.4)
де н = RH/R – коефіцієнт навантаження.
Як випливає з (4.4) і наведених статичних характеристик перетворювача при різних коефіцієнтах навантаження н (рис. 4.6,в,г), зі збільшенням опору навантаження похибка зменшується. У загальному випадку необхідно, щоб коефіцієнт навантаження був як можна більше, однак на практиці його вибирають в межах 10 ... 100. Необхідно відзначити також, що вихідна напруга перетворювача при підключенні навантаження падає через шунтування опором RH частини r опору потенціометра R.
Поряд з лінійними перетворювачами в системах автоматики і управління широко застосовують функціональні перетворювачі.
Для одержання функціональних реостатних перетворювачів використовують такі способи: зміна діаметру дроту вздовж намотування; зміна кроку намотування; застосування каркаса певної конфігурації; шунтування ділянок лінійного потенціометра опорами різних значень. Перші два способи пов'язані з технологічними труднощами і на практиці не застосовуються.
До достоїнств дротяних реостатних перетворювачів можна віднести: простоту конструкції; малі розміри і масу; можливість отримання необхідних функціональних залежностей відносно простими засобами; отримання високоточних лінійних статичних характеристик; стабільність характеристик; малий перехідний опір; можливість роботи на змінному та постійному струмі; малий ТКО.
Недоліками цих елементів слід вважати: наявність ковзаючого контакту, який може стати причиною відмови через окислення контактної доріжки, перетирання витків або відгинання движка; порівняно невеликий коефіцієнт перетворення і високий поріг чутливості; наявність шуму; схильність до електроерозії під дією імпульсних розрядів; обмежену швидкість лінійного переміщення або обертання (до 100...200 об/хв) струмознімача внаслідок його вібрацій при переході з витка на виток і підвищення при цьому рівня динамічного шуму; обмежену частоту змінного струму (до 1000 Гц); низьку зносостійкість.