

Р исунок 4.21 – Асинхронний тахогенератор при п 0
ЕРС обертання ротора Eвр, потік ротора ФqR поперечної осі і вихідна ЕРС ЕГ тахогенератора за значенням (амплітудою) пропорційні частоті обертання ротора п, тобто ЕГ ~ ФqR ~ п.
Вихідна напруга тахогенератора UГ менше ЕРС ЕГ на значення падіння напруги на опорі ΖΓ генераторної обмотки, тобто UГ = ЕГ - ΙГΖГ.
 На
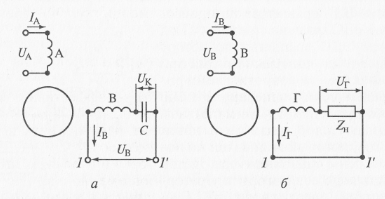
рис. 4.22, а
представлена схема включення двофазного
несиметричного асинхронного двигуна
з конденсатором С
в ланцюзі обмотки В.
На рис. 4.22, б представлена схема включення
асинхронного тахогенератора. Порівнюючи
ці схеми, неважко помітити, що вони дуже
схожі одна на одну, тільки в схемі
тахогенератора затискачі 1-1`,
на які у двигуна подається напруга UB,
замкнені; отже, у тахогенератора UB
= 0. Також у схемі тахогенератора замість
конденсатора С
включено опір навантаження ZH.
На
рис. 4.22, а
представлена схема включення двофазного
несиметричного асинхронного двигуна
з конденсатором С
в ланцюзі обмотки В.
На рис. 4.22, б представлена схема включення
асинхронного тахогенератора. Порівнюючи
ці схеми, неважко помітити, що вони дуже
схожі одна на одну, тільки в схемі
тахогенератора затискачі 1-1`,
на які у двигуна подається напруга UB,
замкнені; отже, у тахогенератора UB
= 0. Також у схемі тахогенератора замість
конденсатора С
включено опір навантаження ZH.
Рисунок 4.22 – Схеми включення двофазного конденсаторного двигуна (а)
і асинхронного тахогенератора (б)
Вихідна напруга тахогенератора UГ може бути знайдено як падіння напруги на опорі ZH навантаження:
UГ = IГ ZH .
До позитивних якостей асинхронних тахогенератора, які сприяють їх вельми широкого поширення, слід віднести:
безконтактність - відсутність ковзних контактів;
малоінерційність, обумовлену малим моментом інерції ротора;
наявність малого моменту опору (моменту тертя в підшипниках і гальмуючого електромагнітного моменту) внаслідок відсутності радіальних і аксіальних сил, що діють на ротор;
велику надійність;
непогану стабільність характеристик.
Недоліками асинхронних тахогенераторів, що обмежують області їх застосування, є:
теоретична і практична нелінійність вихідної характеристики;
наявність фазової похибки;
наявність нульової (залишкової) напруги;
мала вихідна потужність, що призводить до необхідності збільшення габаритних розмірів (асинхронний тахогенератор у 2...4 рази більше тахогенератора постійного струму з такою ж вихідною потужністю);
низький cos φ;
великі габаритні розміри і маса.
Проте не дивлячись на наявність ряду суттєвих недоліків, асинхронні тахогенератора з порожнистим ротором як у нас, так і за кордоном випускаються у великих кількостях.
Синхронні тахогенератори
Великого поширення в даний час отримали синхронні тахогенератори, які конструктивно представляють собою однофазні (а іноді і трифазні) синхронні генератори малої потужності з ротором, що має явно виражені полюси і виконаний у вигляді постійного магніту - зірочки. Завдяки виконанню збудження постійним магнітом в синхронному тахогенератора відсутні ковзні контакти, що значно підвищує його надійність.
При обертанні ротора тахогенератора в обмотці статора його наводиться ЕРС, амплітуда якої прямо пропорційна частоті обертання п:
ЕГ = 4,44 fwГ Ф = 4,44 (рп/60) wГФ = kп,
де f = рп/60 - частота ЕРС, що генерується ; wГ - ефективна кількість витків обмотки статора; Φ - магнітний потік; k = 4,44 (ρινΓ/60)Φ – постійний (при Φ = const) коефіцієнт, що дорівнює крутизні вихідної характеристики; p - число пар полюсів.
Застосування синхронних тахогенератора у ряді схем важко внаслідок того, що у них одночасно з амплітудою при зміні частоти обертання n змінюється і частота f вихідної напруги. Зміна частоти приводить до зміни значення реактивних опорів XL = 2fL і Хс = l/(2fC) як самого тахогенератора, так і навантаження, на якt він працює. Це веде до спотворення вихідної характеристики і до появи похибок.
За певних умов внаслідок виникнення резонансних явищ робота синхронного тахогенератора не задовольняє вимогам схем автоматики. У схемах автоматики, що працюють на частотному принципі, мінливість частоти f (пропорційність її частоті обертання п), навпаки, вважається досить позитивною якістю синхронного тахогенератора.
Позитивною якістю всіх без винятку синхронних тахогенератора є те, що вони при малих габаритних розмірах мають велику вихідну потужність.