

Робота сельсинів в трансформаторному режимі
 Найпростіша
трансформаторна система синхронноuj
зв'язку (рис. 4.28)
складається з двох сельсинів
- приймача і датчика, з'єднаних лінією
зв'язку, підсилювача (У) та виконавчого
двигуна (ВД), вал якого механічно з'єднаний
з валом ротора сельсина-приймача
(зворотний механічний зв'язок).
Найпростіша
трансформаторна система синхронноuj
зв'язку (рис. 4.28)
складається з двох сельсинів
- приймача і датчика, з'єднаних лінією
зв'язку, підсилювача (У) та виконавчого
двигуна (ВД), вал якого механічно з'єднаний
з валом ротора сельсина-приймача
(зворотний механічний зв'язок).
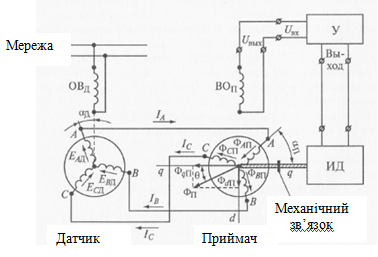
Рисунок 4.28 – Трансформаторна схема синхронного зв’язку
Однофазна обмотка сельсина-датчика ОВД підключається до мережі змінного струму. Струм цієї обмотки створює пульсуючий магнітний потік ФВД, який, зчепляється з обмоткою синхронізації і наводить у її фазах наступні ЕРС:
 (4.19)
(4.19)
де ЕФмах - максимальна ЕРС, що наводяться магнітним потоком в однофазної обмотці збудження датчика.
Значення цих ЕРС залежать від розташування фаз обмотки синхронізації щодо обмотки збудження.
Під дією ЕРС ΕАД, ЕВД, ECД (ЕФД) в з'єднаних між собою однойменних фазах обмоток синхронізації датчика і приймача, а також в лінії зв'язку виникають струми ІА, ІВ, ІС (ІФ), які визначаються значеннями відповідних ЕРС, а також повними опорами фаз датчика zФД, приймача zФΠ та лінії зв'язку zЛ:
![]()
Вважаючи, що фази обмоток синхронізації датчика та приймача мають однакові опори і включають в себе кожна по половині опіру лінії, т. є. zФД +zЛ/2 = zФП + zЛ /2 = zФ отримаємо
![]() (4.20)
(4.20)
Підставивши у вираз (4.20) значення ЕРС відповідних фаз з формули (4.19), можна знайти струми ІА, ІВ, ІС. Ці струми, протікаючи по фазах обмотки синхронізації приймача, створюють пульсуючі магнітні потоки ФАП, ФВП, ФСП, пропорційні магніторушійним силам фаз FAП, FВП, FСП і спрямовані за їх осями.
У двополюсному сельсині магніторушійна сила (МРС) фази (амплітуда її першої гармоніки) може бути знайдена за формулою
![]()
де w - число витків в обмотці фази; kw - коефіцієнт, що залежить від конструкції
обмотки.
МДС фаз легко визначити, підставивши в останню рівність струми ІА, ІВ, ІС з формули (4.20) з урахуванням формули (4.19).
Потоки фаз приймача ФАП, ФВП, ФСП складаючись, утворюють результуючий магнітний потік ФП обмотки синхронізації приймача, спрямований під деяким (залежних від кута розузгодження) кутом до вихідної однофазної обмотки приймача (ВОП).
Потік ФП, пульсуючи з частотою мережі, наводить у вихідній однофазній обмотці приймача ЕРС, що є вихідною напругою приймача UBИХ.
Узгодженим становищем сельсинів в трансформаторній системі синхронного зв'язку називається такий стан роторів, при якому вихідна напруга приймача UBИX дорівнює нулю. На відміну від узгодженого положення сельсинів в індикаторної системі в цьому випадку поворот ротора сельсина-приймача становить 90°. Внаслідок цього за початок відліку кутів у сельсині-приймачі приймається точка на осі, перпендикулярної осі однофазної вихідної обмотки (див. рис. 4.28).
Сельсин-приймач в трансформаторній системі синхронного зв'язку самостійно не відпрацьовує заданий датчиком кут Д, а лише виробляє ЕРС вихідної обмотки, що змінюється за законом синуса залежно від кута розузгодження . Відпрацювання заданого датчиком кута - поворот ротора сельсина-приймача на кут П = Д - здійснюється за допомогою виконавчого двигуна.
Принцип дії трансформаторної системи синхронної зв'язку (див. рис. 4.28) полягає в наступному. При виведенні ротора сельсина-датчика з узгодженого положення (повороті на деякий кут Д = ) на вихідний обмотці сельсина-приймача з'являється напруга UВИХ. Ця напруга подається на вхід підсилювача, а потім на обмотку управління виконавчого двигуна.
Ротор двигуна починає обертатися, повертаючи при цьому ротор сельсина-приймача, з яким він механічно пов'язаний. Разом з ротором приймача повертається у просторі і його магнітний потік ФП; при цьому змінюються потокозчеплення з вихідною обмоткою та її ЕРС (вихідна напруга UВИХ). Ротори двигуна і сельсина-приймача повертаються до тих пір, поки ротор сельсина-приймача не повернеться на заданий датчиком кут П = Д і сельсини не займуть узгоджене положення, в якому потік ФП перпендикулярний осі вихідної обмотки ВОП і вихідна напруга сельсина-приймача UВИХ, а отже, і напруга на підсилювачі і обмотці управління виконавчого двигуна, дорівнюють нулю.
На відміну від індикаторної системи синхронного зв'язку за проводами лінії зв'язку трансформаторної системи завжди, навіть в узгодженому положенні, протікають струми. Сельсини-приймачі в трансформаторній системі живляться не від мережі (як це має місце в індикаторної системі), а від обмотки синхронізації датчика.
Поворотні трансформатори
Загальні відомості
Поворотні трансформатори - це невеликі індукційні електричні машини, призначені для перетворення механічного переміщення (кута повороту ротора ) в електричний сигнал - вихідну напругу U, амплітуда якого знаходиться у певній функціональній залежності від кута повороту ротора.
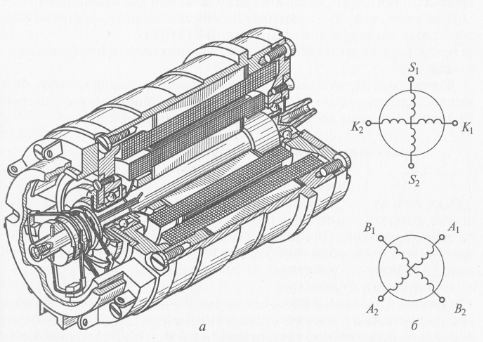 Конструктивно
поворотні трансформатори вельми
різноманітні, проте в даний час найбільшого
поширення набули двополюсні поворотні
трансформатори, виготовлені аналогічно
двофазним асинхронним двигунам з
контактними кільцями. Пакети статора
і ротора таких поворотних трансформаторів
(ПТ) виготовляють з ретельно ізольованих
один від одного листів електротехнічної
сталі, отриманих на штампах високої
точності. У напівзакритих пазах статора
і ротора розташовуються двофазні
обмотки, осі яких зсунуті на 90 ° відносно
одна одної (рис. 4.29). Зазвичай обидві
обмотки S
і К
статора мають однакове число витків
(wS
= wK)
та однакові активні R
і реактивні опори X.
Обмотки ротора А
і В
також виконуються однаковими
(wA
= wB;
RA
= RB;
ХА
= XB).
Конструктивно
поворотні трансформатори вельми
різноманітні, проте в даний час найбільшого
поширення набули двополюсні поворотні
трансформатори, виготовлені аналогічно
двофазним асинхронним двигунам з
контактними кільцями. Пакети статора
і ротора таких поворотних трансформаторів
(ПТ) виготовляють з ретельно ізольованих
один від одного листів електротехнічної
сталі, отриманих на штампах високої
точності. У напівзакритих пазах статора
і ротора розташовуються двофазні
обмотки, осі яких зсунуті на 90 ° відносно
одна одної (рис. 4.29). Зазвичай обидві
обмотки S
і К
статора мають однакове число витків
(wS
= wK)
та однакові активні R
і реактивні опори X.
Обмотки ротора А
і В
також виконуються однаковими
(wA
= wB;
RA
= RB;
ХА
= XB).
Рисунок 4.29 – Загальний вигляд (а) та схеми обмоток (б) поворотного трансформатора
У більшості поворотних трансформаторів кінці обмоток ротора виводяться до контактних кілець, за якими ковзають щітки. Кільця та щітки звичайно виготовляються із сплавів срібла. У деяких поворотних трансформаторах, призначених для роботи з обмеженим кутом повороту ротора, кільця та щітки замінюються гнучкими спіральними пружинами з латуні (на зразок струмознімачів вимірювальних приладів).
Особливістю обертових трансформаторів є те, що у них взаємоіндуктивність між первинними (статора) та вторинними (ротора) обмотками при повороті ротора на кут α змінюється строго за синусоїдальному (або косинусоїдальному) закону в залежності від кута , що за певних умов забезпечує такий ж закон зміни амплітуди ЕРС вторинних обмоток.
Залежно від того, якою функцією кута повороту ротора є вихідна напруга U, розрізняють наступні поворотні трансформатори:
синусні (СПТ) – U = Umaxsin, де Umax - максимальне вихідна напруга.
синусно-косинусні (СКПТ) – UA = Umaxsin; UB = Umaxcos;
лінійні (ЛПТ) – U = k, де k = const.
Чотирьохобмоточні поворотні трансформатори, що мають по дві обмотки на статорі і роторі, в автоматиці та обчислювальній техніці при певних схемах з'єднання обмоток використовуються у вигляді:
розбудовників, що дозволяють виробляти перетворення координат, визначати (будувати) вектор за його складовими;
приладів для узгодження (масштабування) напруг окремих каскадів - масштабних ПТ (МПТ);
трансформаторних сельсинів в системах синхронної зв'язку;
фазозсувач.
Один і той же поворотний трансформатор практично може виконувати різні функції. Його вихідні характеристики залежать від схем з'єднання і живлення обмоток.