

Індуктивні датчики
Принцип дії індуктивних датчиків оснований на зміні индуктивності L або взаємоіндуктивності обмоток з сердечником внаслідок змінення магнітного
опору Rm магнітного ланцюга датчика, в яку входить сердечник.
Індуктивні датчики відносяться до класу параметричних. Вимірюване переміщення на вході датчика викликає зміну параметрів магнітної та електричної ланцюгів, що, у свою чергу, викликає зміну вихідної величини - електричного струму або напруги U.
За допомогою індуктивних датчиків можна контролювати механічні переміщення, сили, температуру, властивості магнітних матеріалів, визначати наявність дефектів, контролювати діаметр сталевого дроту, товщину немагнітних покриттів на сталі та ін.
 Індуктивні
датчики відрізняє ряд переваг: простота
і міцність конструкції, надійність в
роботі, відсутність ковзних контактів,
велика величина потужності на виході
(до декількох десятків ватів), висока
чутливість (до 100 В/мм).
Індуктивні
датчики відрізняє ряд переваг: простота
і міцність конструкції, надійність в
роботі, відсутність ковзних контактів,
велика величина потужності на виході
(до декількох десятків ватів), висока
чутливість (до 100 В/мм).
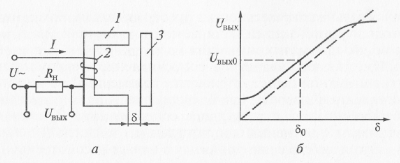
1 – сердечник; 2 – обмотка; 3 - якір
Рисунок 4.8 – Схема (а) и характеристика (б)
однотактного індуктивного перетворювача
Розглянемо роботу однотактного індуктивного перетворювача (рис. 4.8, а). Вихідний сигнал отримують у вигляді змінної напруги, що знімається з опору навантаження RH, включеного в ланцюг обмотки 2, розташованої на сердечнику 1. Живлення здійснюється змінною напругою UС частотою від 50 до кількох тисяч герц. Під дією вхідного сигналу переміщується якір 3 та змінюється зазор δ. Вихідна напруга датчика:
![]()
Середнє значення струму в робочому колі перетворювача складає
![]() (4.5)
(4.5)
де R - сумарний активний опір ланцюга, R = RH +R0; R0 – активний опір
обмотки; XL – реактивний опір ланцюга; ω – кутова частота.
Індуктивність обмотки L є функцією зазору δ з магнітним опором rδ:
![]() (4.6)
де
w
– число
витків
обмотки;
0
– магнітна проникність повітря у зазорі;
S
–
площа поперечного перерізу
зазору.
(4.6)
де
w
– число
витків
обмотки;
0
– магнітна проникність повітря у зазорі;
S
–
площа поперечного перерізу
зазору.
Враховуючи, що на практиці для індуктивних перетворювачів виконується умова R « XL, і підставляючи вираз (4.6) в (4.5), отримуємо

Коефіцієнт перетворення К = URH / (ω0Sw2) - величина постійна, тому статична характеристика UBUX = f(δ) повинна являти собою пряму, що проходить через початок координат під кутом α = arctg K до осі абсцис (рис. 4.7,б, штрихова лінія). Реальна характеристика перетворювача, показана на малюнку суцільною лінією, відрізняється від ідеальної. Це пояснюється тим, що при малих значеннях δ допущення rm << rδ стає невірним, оскільки магнітний опір феромагнітної ділянки магнітного ланцюга rm стає сумірним з магнітним опором зазору rδ; при великих значеннях δ падає індуктивність обмотки L і реактивне опір XL стає сумірним з активним опором магнітної ланцюга, тобто R XL. Це недотримання прийнятих на початку розгляду припущень і призводить до спотворення статичної характеристики.
 Аналіз
принципу дії і статичної характеристики
однотактного вимірювального індуктивного
перетворювача дозволяє виявити наступні
його недоліки: фаза вихідного сигналу
не залежить від напрямку переміщення
якоря; для вимірювання переміщення в
обох напрямках необхідний початковий
зазор δ0,
що призводить до наявності залишкового
(початкового значення) напруги
Uвих0
(див. рис. 4.7,б);
на якір постійно діє електромагнітна
сила, яка прагне притягнути його до
ярма. При великій потужності сигналу
вихідного
ланцюга вона може приймати істотні
значення, що вимагає введення компенсуючих
сил. Останні створюються пружинами, а
це значно ускладнює пристрій.
Аналіз
принципу дії і статичної характеристики
однотактного вимірювального індуктивного
перетворювача дозволяє виявити наступні
його недоліки: фаза вихідного сигналу
не залежить від напрямку переміщення
якоря; для вимірювання переміщення в
обох напрямках необхідний початковий
зазор δ0,
що призводить до наявності залишкового
(початкового значення) напруги
Uвих0
(див. рис. 4.7,б);
на якір постійно діє електромагнітна
сила, яка прагне притягнути його до
ярма. При великій потужності сигналу
вихідного
ланцюга вона може приймати істотні
значення, що вимагає введення компенсуючих
сил. Останні створюються пружинами, а
це значно ускладнює пристрій.
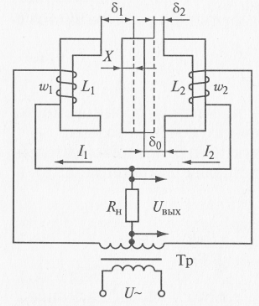
Рисунок 4.9 – Диференціальна схема індуктивного перетворювача
Безпосередньо для вимірювальних цілей застосовують двотактні вимірювальні перетворювачі, які можуть включатися за диференціальною або мостовою схемами.
Диференціальна схема включення індуктивного вимірювального перетворювача вимагає використання трансформатора з середньою точкою (рис. 4.9). Обидва сердечники ідентичні за своїм конструктивним і магнітним характеристикам. Розташовані на них обмотки w1 і w2 мають також однакові параметри та включені послідовно-зустрічно. Опір навантаження RH включається між середньою точкою трансформатора і середньою точкою обмоток перетворювача.
У такій схемі струм Iвих, що протікає по опору навантаження, дорівнює різниці струмів правою і лівою половин схеми. У векторній формі це рівність прийме наступний вигляд
![]()
а вихідна напруга
![]()
При відсутності вхідного сигналу зазори δ1 і δ2 між якорем і ярмом однакові: δ1 = δ2 = δ0. Рівними є й індуктивності L1 і L2 обох половин датчика, що визначаються розмірами зазорів. Отже, вихідна напруга перетворювача UBИX відповідно до (4.7) дорівнює нулю (рис. 4.10,а).
а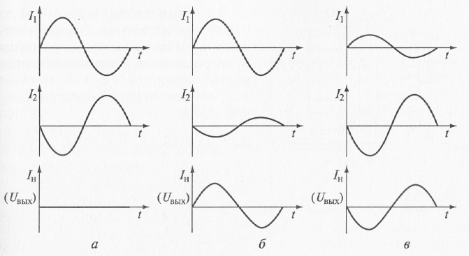 )
δ1
= δ2
= δ0;
б)
δ1
>
δ2;
в) δ1
<
δ2
)
δ1
= δ2
= δ0;
б)
δ1
>
δ2;
в) δ1
<
δ2
Рисунок 4.10 – Часові графіки зміни струмів та напруг
При переміщенні якоря на відстань X зазори δ1 і δ2 стають нерівними: δ1 = δ0 + Χ; δ2 = δ0 - Χ.
Зміна
зазорів призводить до зміни індуктивностей:
збільшення δ1
веде до зменшення L1
а зменшення δ2
- до збільшення L2.
Зміна індуктивностей плечей датчика
призводить до дисбалансу струмів
![]() і
і
![]() ,
у результаті чого через опір навантаження
потече струм
,
у результаті чого через опір навантаження
потече струм
![]() ,
і з'явиться вихідна напруга
(рис.
4.10,
б).
,
і з'явиться вихідна напруга
(рис.
4.10,
б).
Якщо змінюється напрямок переміщення якоря, фаза вихідної напруги зсувається на 180° щодо напруги живлення, яка є опорною (рис. 4.10,в).
Принцип дії мостовий схеми індуктивного перетворювача (рис. 4.11)
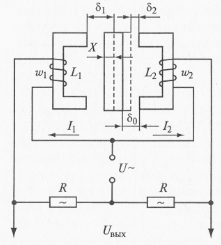
Рисунок 4.11 – Мостова схема індуктивного перетворювача
аналогічний принципу дії диференціальної схеми. Вихідна напруга мостової
схеми
![]() (4.7)
(4.7)
У
вихідному стані при δ1
=
δ2
= δ0,
L1
= L2
= L0,
UBИX
= 0, так як
![]() =
.
Переміщення якоря вправо на відстань
X
призводить
до зміни зазорів:
δ1
=
δ0
+ Χ;
δ2
= δ0
- Χ,
а також індуктивностей плечей моста:
=
.
Переміщення якоря вправо на відстань
X
призводить
до зміни зазорів:
δ1
=
δ0
+ Χ;
δ2
= δ0
- Χ,
а також індуктивностей плечей моста:
L1 = L0 - L; L2 = L0 + L . (4.8)
Вважаючи, що активний опір обмоток є малим у порівнянні з їх індуктивним опором, можна записати комплексні вирази величин і в наступний алгебраїчної формі:
![]() (4.9)
(4.9)
де j - уявна одиниця.
Підставляючи формули (4.9) у вираз (4.7) з урахуванням (4.8), і виконуючи алгебраїчні перетворення при умові L << L0 , можна отримати:
![]() .
.
Амплітуда вихідної напруги запишіться у вигляді:
 . (4.10)
. (4.10)
Оскільки всі параметри за виключенням Х є постійними, то вираз (4.10) можна записати наступним чином:
![]()
де К
=
![]() /
[
/
[![]() ]
– коефіцієнт
перетворення
індуктивного датчика.
]
– коефіцієнт
перетворення
індуктивного датчика.
Таким чином, статична характеристика двотактного індуктивного вимірювального перетворювача являє собою функцію виду UBUX = КХ і відповідає прямій, що проходить через початок координат під кутом = arctg К (рис. 5.12).
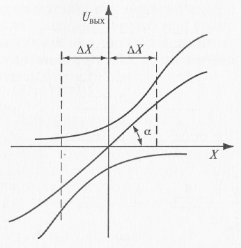
Рисунок 4.12 – Статична характеристика двотактного перетворювача
Як видно з рисунку, при зміні напрямку переміщення вхідний величини X модуль вихідного сигналу змінює знак (фаза змінюється на 180°). Крім того, зі збільшенням вхідного сигналу спостерігається відхилення вихідної характеристики від лінійної, що пояснюється зменшенням індуктивного опору та наближенням його значення до опору навантаження. У зв'язку з цим значення Х для реверсивних індуктивних датчиків не повинно перевищувати (0,3 ... 0,4)δ0. У цьому випадку вихідну характеристику можна вважати лінійною.
Двотактні вимірювальні перетворювачі з плоским повітряним зазором використовують при вимірюванні малих переміщень від сотих часток мікрометра до 3...5 мм.
Ще одним різновидом індуктивних перетворювачів є трансформаторні. Схема трансформаторного вимірювального перетворювача наведена на рисунку 4.13. Обмотки ланцюга живлення w1 i w2 однакові і включені таким чином, що, коли по них протікає робочий струм, створювані ними магнітні потоки Ф1 та Ф2 спрямовані зустрічно в центральному стрижні, на якому розташована вихідна обмотка w0. У цьому випадку вихідна напруга
![]()
д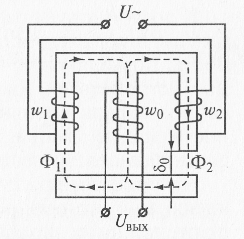 е
f
– частота напруги живлення.
е
f
– частота напруги живлення.
Рисунок 4.13 – Схема трансформаторного перетворювача
Якщо вважати струм I в ланцюзі живлення постійним, що досягається включенням у коло живлення додаткового дроселя для однотактних датчиків або відповідним включенням обмоток живлення двотактних датчиків, то магнітні потоки пропорційні індуктивностям обмоток w1 і w2 :
![]()
Так як у розглянутій конструкції перетворювача зазор залишається постійним, а якір переміщається уздовж зазору, то значення індуктивності залежить від перетину магнітного осердя, що визначається площею перекриття S стрижнів, яка змінюється при переміщенні якоря.
У нейтральному положенні при Х = 0 площі перекриття стрижнів рівні:
S1 = S2 = S0, що призводить до рівності потоків: Ф1 та Ф2 і, отже, UBИХ = 0.
При переміщенні якоря вліво на відстань X площа перекриття правого крайнього стрижня зміниться на S, і для потоків в крайніх стержнях можна записати

Вихідну напругу датчика можна описати лінійною залежністю UBИX = KS = К1Х, так як площі перекриття стрижнів пропорційні переміщенню якоря X. Коефіцієнт перетворення на підставі наведених вище виразів можна записати у вигляді
![]() (4.11)
(4.11)
З порівняння формул (4.10) і (4.11) видно, що всі наведені раніше міркування про вплив конструктивних параметрів на характеристики
індуктивного датчика справедливі і для трансформаторних датчиків.
До достоїнств розглянутих індуктивних трансформаторних датчиків слід віднести досить високу вихідну потужність, що дозволяє в багатьох випадках обійтися без підсилювальних пристроїв; високі чутливість та роздільну здатність; порівняльну простоту конструкції; високу надійність; малі масу і розміри при роботі на підвищеній частоті; невисоку вартість.
Недоліками розглянутих вимірювальних перетворювачів є трудність регулювання і компенсації початкової напруги на їх виході; необхідність екранування для зменшення рівня перешкод, що обумовлює збільшення розмірів і маси; можливість роботи тільки на змінному струмі; обмеженість діапазону лінійної статичної характеристики.