

Робота сельсинів в індикаторному режимі
Найпростіша індикаторна система синхронної зв'язку для дистанційної передачі кута складається з двох однакових сельсинів (приймача і датчика) та лінії зв'язку (рис. 4.27). Обмотки збудження (ОВ) обох сельсинів підключаються до однофазної мережі змінного струму. Кінці фаз А, В, С обмотки синхронізації приймача з'єднуються лінією зв'язку з кінцями фаз обмотки синхронізації датчика.
Змінні струми ІЗД та ІЗП обмоток збудження сельсинів створюють магнітні потоки ФЗД і ФЗП, які індукують в обмотках синхронізації сельсинів електрорушійні сили: ЕАД, EВД, EСД, ЕАП, ΕВП і ЕСП. Значення ЕРС обмотки тієї чи іншої фази залежить від її просторового розташування відносно обмотки збудження. Якщо фази обмоток синхронізації датчика та приймача розташовані однаково щодо відповідних обмоток збудження (Д = П), то в з'єднаних між собою лінією зв'язку обмотках синхронізації приймача і датчика індукуються однакові і зустрічно спрямовані ЕРС. Ці ЕРС врівноважують одна одну, і в ланцюзі обмоток синхронізації струм відсутній. Таке положення роторів сельсинів називається узгодженим.
Якщо ротор датчика поворотом на деякий кут вивести з узгодженого положення, то рівновага ЕРС, індукованих в однойменних обмотках синхронізації, порушиться. За рахунок цього в обмотках синхронізації та лінії зв'язку з'являться струми ІА, ІВ і Іс. У результаті взаємодії цих струмів з магнітними потоками обмоток збудження виникнуть обертальні моменти як в сельсині-датчику, так і в сельсині-приймачі, які будуть прагнути привести ротори сельсинів в узгоджене положення. Обертальні моменти, що діють на ротори приймача і датчика, будуть рівні за значенням і протилежні за напрямком.
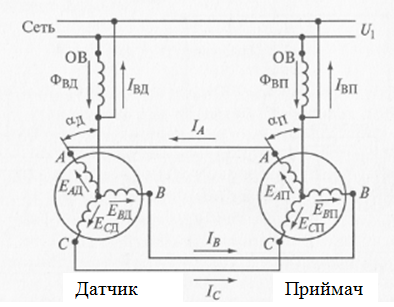
Рисунок 4.27 – Індикаторна система синхронного зв’язку
Так як ротор сельсина-датчика після повороту зазвичай фіксується (загальмовується), то повертатися (до узгодженого положення) буде ротор сельсина-приймача. Значення синхронізуючого моменту, що розвивається сельсином-приймачем, залежить від кута розузгодження і параметрів сельсинів системи.
Основною вимогою, яка пред'являється до сельсинів, які працюють у схемах синхронного зв'язку, є точність відпрацювання сельсином-приймачем заданого сельсином-датчиком кута. Точність роботи сельсинів у схемі синхронної зв'язку залежить як від якості роботи (точності) сельсинів-приймачів, так і від якості роботи (точності) сельсинів-датчиків.
Точність роботи сельсина-приймача в індикаторної режимі характеризується похибкою Δ, яка визначається як півсума максимального позитивного мах1 і максимального негативного мах2 відхилень ротора приймача від узгодженого з ротором датчика положення за один оборот:
![]()
Похибка у статичному режимі визначається шляхом повороту ротора датчика спочатку за годинниковою стрілкою на 360°. Вимірювання похибки проводиться або безперервно (з допомогою приладів), або через 1 або 10° в залежності від необхідної точності.
За значенням похибки Δ в статичному режимі при роботі за схемою «один на один» розрізняють індикаторні сельсини-приймачі чотирьох класів точності: 1-й клас - Δ не більше ± 30'; 2-й клас - Δ не більше ± 45'; 3 -й клас - Δ не більше ± 60'; 4-й клас - Δ не більше ± 90'.
Точність роботи сельсинів-приймачів у індикаторної режимі визначає ряд факторів:
питомий синхронізуючий момент МПД - момент, який припадає на 1 кута розузгодження;
момент опору на валу приймача МС (зазвичай момент тертя самого приймача МС = МТ);
добротність сельсина - відношення питомої синхронізуючого моменту до моменту тертя (Д = МПД / МТ);
магнітна і електрична асиметрія;
дисбаланс ротора;
час заспокоєння - час, протягом якого заспокоюється (зупиняється) ротор приймача після неузгодженості на ± 179 °;
точність сельсинів-датчиків, режим роботи та ін.