

Синусні поворотні трансформатори
Для того щоб розібратися у фізичних процесах, розглянемо спочатку найпростіший (синусний) поворотний трансформатор. Для спрощення аналізу тут і далі будемо вважати, що трансформатор абсолютно не насичений (що, як правило, і буває на практиці), і оперувати не МДС, а магнітними потоками Φ обмоток.
Синусний поворотний трансформатор (СПТ) може працювати за наявності всього двох обмоток: обмотки статора S, підключеної до мережі змінного струму (назвемо її обмоткою збудження), та обмотки ротора А, що є вторинною (вихідний) обмоткою (рис. 4.30, а).
При холостому ході, коли ZAн і ІН = 0, внаслідок того що взаємоіндуктивність між обмотками статора і ротора змінюється за синусоїдальним законом у залежності від кута повороту ротора , ЕРС вихідний обмотки, що наводяться потоком первинної обмотки ФS, буде синусоїдальної функцією кута :
![]() (4.21)
(4.21)
де EAmax - максимальна ЕРС обмотки А, що наводяться в разі збігу осей обмоток А і S ( = 90°).
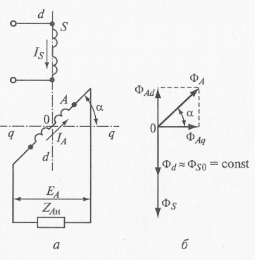

Рисунок 4.30 – Схема включення Рисунок 4.31 – Залежності ЕРС обмот-
синусного ПТ (а) і векторна ки А при холостому ході EA0 і на-
діаграма його магнітних вантаженні EA та погрішності EA
потоків (б) від кута повороту ротора
Максимальну ЕРС можна виразити через ЕРС ES, що наводяться потоком в первинній обмотці статора S, і відношення ефективних чисел витків (wA і ws) обмоток А і S, як і в звичайному трансформаторі:
![]() (4.22)
(4.22)
де kmax = wA/wB = kwAw`A/kwSw`S – максимальний коефіцієнт трансформації;
w`A, kwA, w`S, kwS – істинні числа витків і обмоточні коефіцієнти відповідних
обмоток.
З урахуванням формули (4.22) вираз (4.21) для ЕРС вихідної обмотки при холостому ході має вигляд
![]()
або, якщо не враховувати падіння напруги на власному опорі обмотки збудження S,
![]()
де k() = kmaxsin = (wA/wS)sin - коефіцієнт трансформації поворотного трансформатора, який на відміну від коефіцієнта трансформації звичайного трансформатора є функцією кута повороту ротора .
На рис. 4.31 представлені ЕРС обмотки А при холостому ході ЕА0, при навантаженні ЕА і похибка ЕА, що вноситься паразитним поперечним потоком ФАq (див. рис. 4.30 б), як функції кута повороту ротора. Похибка ЕА залежить від значення комплексного коефіцієнта а (у наведених флокулах не показаний). У реальних обертових трансформаторах він невеликий, тому похибка ЕА у них значно менше, ніж на рис. 4.31, де коефіцієнт а прийнятий рівним одиниці.
На практиці частіше застосовуються не синусних, а синусно-косинусні обертові трансформатори.
Синусно-косинусні поворотні трансформатори
 Синусно-косинусні
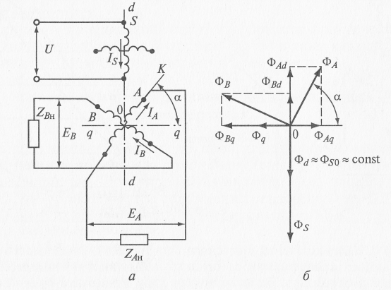
поворотні трансформатори (СКПТ) мають
не дві, а чотири обмотки (мал. 4.32, а).
Дві обмотки S
і K
розташовуються на статорі. Вони зсунуті
в просторі на 90° і мають зазвичай однакове
число витків, а
також
однакові власні опори (wS
= wK;
ZS
= ΖK).
Дві інші обмотки А
і В
розташовуються на роторі. Вони також
зрушені на 90°
між собою і мають однакові параметри
(wA
=
wB;
ΖΑ
= ΖΒ).
Синусно-косинусні
поворотні трансформатори (СКПТ) мають
не дві, а чотири обмотки (мал. 4.32, а).
Дві обмотки S
і K
розташовуються на статорі. Вони зсунуті
в просторі на 90° і мають зазвичай однакове
число витків, а
також
однакові власні опори (wS
= wK;
ZS
= ΖK).
Дві інші обмотки А
і В
розташовуються на роторі. Вони також
зрушені на 90°
між собою і мають однакові параметри
(wA
=
wB;
ΖΑ
= ΖΒ).
Рисунок 4.32 – Схема включення СКПР (а) та векторна діаграма
його магнітних потоків
Оскільки обмотка В зсунута на 90 відносно обмотки А, то в тому випадку, коли ЕРС другої обмотки змінюється за законом синуса залежно від кута повороту ротора α, ЕРС першої обмотки змінюється за законом косинуса.
Аналізуючи діаграму магнітних потоків синусно-косинусного поворотного трансформатора, представлену на рис. 4.32, б, неважко помітити, що поперечні потоки ФАq і ФBq обмоток А і В ротора направлені на зустріч один одному. Це означає, що при наявності двох вторинних обмоток А і В сумарний поперечний потік при навантаженні Фq = ФAq + ФВq завжди менше, ніж за наявностю однієї обмотки. Менше значення потоку вздовж поперечної осі призводить до меншої похибки поворотного трансформатора.