

8. Проекции силы на оси координат.
Проекцией силы на ось называется алгебраическая величина, равная произведению силы на косинус угла между направлением силы и положительным направлением оси.
Если проекцию
силы ![]() обозначить
обозначить ![]() ,
то согласно определению
,
то согласно определению
![]() .
.
В случае,
когда сила и ось расположены в одной
плоскости, для определения проекции
силы
на
ось ![]() (рис.
3.1) следует из начала
(рис.
3.1) следует из начала ![]() и
конца
и
конца ![]() силы
опустить
перпендикуляры на ось
.
Полученный отрезок
силы
опустить
перпендикуляры на ось
.
Полученный отрезок ![]() есть проекция
.
Знак проекции принимается положительным,
если направление отрезка
совпадает
с положительным направлением оси
(рис.
3.1), и отрицательным,
если направления противоположны (рис.
3.2).
есть проекция
.
Знак проекции принимается положительным,
если направление отрезка
совпадает
с положительным направлением оси
(рис.
3.1), и отрицательным,
если направления противоположны (рис.
3.2).
|
|
Рис. 3.1. Определение проекции силы на ось (направление отрезка совпадает с положительным направлением оси Х) |
Рис. 3.2. Определение проекции силы на ось (направления отрезка и оси Х противоположны) |
Модуль
проекции
или
длина отрезка
вычисляется
из прямоугольного треугольника ![]() : для рис.
3.1 имеем
: для рис.
3.1 имеем ![]() ;
для рис. 3.2 –
;
для рис. 3.2 – ![]() ,
, ![]() .
.
9. аналитический способ определения равнодействующей плоской системы сходящихся силВеличина равнодействующей равна векторной (геометрической) сумме векторов системы сил. Определяем равнодействующую геометрическим способом. Выберем систему координат, определим проекции всех заданных векторов на эти оси (рис. 3.4а). Складываем проекции всех векторов на оси х и у (рис. 3.46).
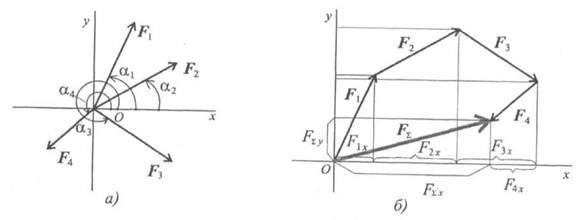
FΣч = Flx + F2x + F3x + F4x; FΣн = Fly + F2y + F3y + F4y;
![]() ;
; ![]() .
.
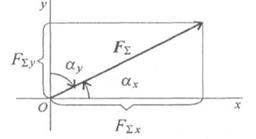
Модуль (величину) равнодействующей можно найти по известным проекциям:
![]() .Направление
вектора равнодействующей можно определить
по величинам и знакам косинусов углов,
образуемых равнодействующей с осями
координат (рис. 3.5).
.Направление
вектора равнодействующей можно определить
по величинам и знакам косинусов углов,
образуемых равнодействующей с осями
координат (рис. 3.5).
-
 ;
; 
Условия равновесия плоской системы сходящихся сил в аналитической форме
Исходя из того, что равнодействующая равна нулю, получим:
![]()
FΣ = 0.
Условия равновесия в аналитической форме можно сформулировать следующим образом: Плоская система сходящихся сил находится в равновесии, если алгебраическая сумма проекций всех сил системы на любую ось равна нулю.Система уравнений равновесия плоской сходящейся системы сил:
![]() .
.
В задачах координатные оси выбирают так, чтобы решение было наиболее простым. Желательно, чтобы хотя бы одна неизвестная сила совпадала с осью координат.
10. Момент силы относительно точки
Если под действием приложенной силы твердое тело может совершать вращение вокруг некоторой точки, то для того, чтобы охарактеризовать вращательный эффект силы вводится понятие – момент силы относительно точки (или центра).
Моментом силы относительно точки (рисунок 1.1) называется векторное произведение радиус-вектора точки приложения силы на вектор силы.
Mo(F) = r ⊗ F
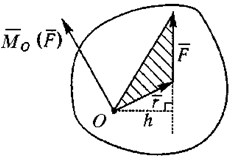
Рисунок 1.1
Вектор момента направлен перпендикулярно плоскости, в которой лежат сила и точка, в ту сторону, откуда поворот от действия силы виден происходящим против хода часовой стрелки. Вектор момента характеризует положение плоскости и направление вращательного действия силы, а также дает меру этого действия:
|Mo(F)| = F⋅r⋅sinα = F⋅h,
где h – плечо силы (кратчайшее расстояние от точки O – центра момента – до линии действия силы). Если сила проходит через точку, то ее момент относительно этой точки равен нулю.
Момент силы относительно точки не меняется от переноса силы вдоль линии ее действия.