1.Общие понятия о предмете ПМ. Преподавание курса "Прикладная механика" имеет целью сообщить студентам необходимые сведения из области кинематики и динамики механизмов, теоретических основ сопротивления материалов, а так же методы расчёта на прочность, жёсткость деталей машин и механизмов, являющихся общими для различных областей машиностроения, дать первые практические навыки расчётов и проектирования деталей и механизмов. Курс "Прикладная механика" является базой для изучения профилирующих дисциплин, требующих умения проводить расчёты на прочность, долговечность, а так же навыков конструирования.
2.Основные понятия статики. Статика – раздел механики, в котором изучаются методы преобразования систем сил в эквивалентные системы и устанавливаются условия равновесия сил приложенных к твѐрдому телу. Материальное тело, размерами которого можно пренебречь в конкретных условиях, называют материальной точкой. Механическая система или система материальных точек – совокупность материальных точек, в которой положение и движение каждой точки зависит от положения и движения других точек системы. Абсолютно твѐрдое тело – тело, расстояние, между любыми точками которого остаются неизменными. Твѐрдое тело может находится в состоянии покоя или некоторого движения. Такое состояние тела называется кинематическим состоянием тела. Механическое взаимодействие – взаимодействие двух тел, сопровождающееся изменением их кинематического состояния.
3.Разложение сил на две составляющие.
Пусть дана сила,которая характеризуется какой-то величиной «F» и углом к осям системы координат «α».
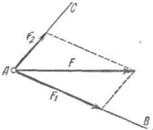
При расчете данная сила раскладывается на две составляющие «Fx», «Fy», которые определяются как проекции этой силы на координатные оси:


4. Связи и реакции связей. Принцип освобождения.
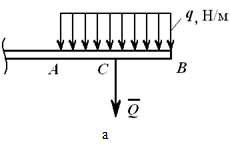
5. Распределённые нагрузки
Воздействие на детали, конструкции, элементы механизмов может быть задано распределенными нагрузками: в плоской системе задается интенсивность действия по длине конструкции, в пространственной системе – по площади.
Например, на рисунке 1.23, а приведена равномерно распределенная по длине AB нагрузка интенсивностью q , измеряемая в Н/м. Эта нагрузка может быть заменена сосредоточенной силой Q = q⋅ AB [Н], приложенной в середине отрезка AB .
6. Геометрический способ определения равнодействующей плоской системы
Плоская система сходящихся сил
Система сил, линии действия которых пересекаются в одной точке, называется сходящейся (рис. 2.1).
Необходимо определить равнодействующую системы сходящихся сил (F1; F2; F3; …; Fn), n — число сил, входящих в систему.
По следствию из аксиом статики, все силы системы можно переместить вдоль линии действия, и все силы окажутся приложенными в одной точке.

Рис. 2.1
Равнодействующая сходящихся сил
Равнодействующую двух пересекающихся сил можно определить с помощью параллелограмма или треугольника сил (4-я аксиома) (рис. 2.2).
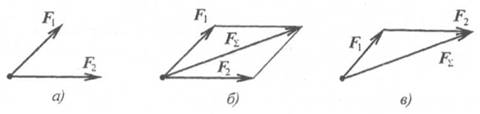
Рис. 2.2
Используя свойства векторной суммы сил, можно получить равнодействующую любой сходящейся системы сил, складывая последовательно силы, входящие в систему. Образуется многоугольник сил (рис. 2.3). Вектор равнодействующей силы соединит начало первого вектора с концом последнего.
При графическом способе определения равнодействующей векторы сил можно вычерчивать в любом порядке, результат (величина и направление равнодействующей) при этом не изменится.
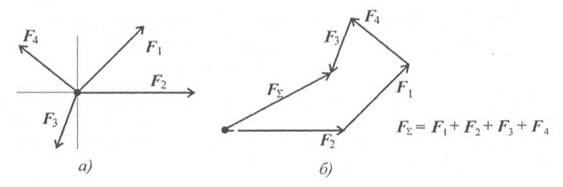
Вектор равнодействующей направлен навстречу векторам сил-слагаемых. Такой способ получения равнодействующей называют геометрическим.
7. Геометрическое условие равновесия плоской системы сходящихся сил.
Эти условия определяют, когда твердое тело находится в равновесии под действием системы сходящихся сил. Сформулируем условие, а затем докажем его.
Для равновесия твердого тела под действием системы сходящихся сил необходимо и достаточно, чтобы геометрическая сумма всех сил системы была равна нулю:
|
(2) |
Необходимость условия сразу следует из (1). При выполнении условия (2) получим R* = 0, следовательно F1, F2,..., Fn ~ 0.
Достаточность условия равновесия докажем методом от противного. Предположим, что условие (2) не выполняется, а твердое тело находится в равновесии. Но если (2) не выполняется, то система сходящихся сил приводится к одной силе, а тело под действием одной силы не может находиться в равновесии. Таким образом, достаточность условия равновесия доказана.
В ыражение
(2) представляет собой условие равновесия
в векторной или геометрической
форме.
Вспомнив суммирование векторов по
правилу векторного многоугольника
(рис. 13), формулируем условие равновесия
иными словами. На рисунке вектор R* является
суммой векторов и не равен нулю. Но
если R* =
0,
то конец последнего вектора попадет в
начало первого вектора, и векторный
многоугольник, который в нашем случае
можно назвать силовым многоугольником,
окажется замкнутым.
ыражение
(2) представляет собой условие равновесия
в векторной или геометрической
форме.
Вспомнив суммирование векторов по
правилу векторного многоугольника
(рис. 13), формулируем условие равновесия
иными словами. На рисунке вектор R* является
суммой векторов и не равен нулю. Но
если R* =
0,
то конец последнего вектора попадет в
начало первого вектора, и векторный
многоугольник, который в нашем случае
можно назвать силовым многоугольником,
окажется замкнутым.
Следовательно, для равновесия твердого тела под действием системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник системы был замкнутым.
Применение условия равновесия в геометрической форме ограничено трудностью построения силового многоугольника в пространстве. Более универсальными являются условия равновесия в аналитической форме. Для получения этих условий выберем систему координат OXYZ, связанную с поверхностью Земли . Проектируя на оси координат векторное равенство (2), имеем F1x + F2x +...+ Fnx = 0; F1y + F2y +...+ Fny = 0; F1z + F2z +...+ Fnz = 0. Записав эти выражения в компактной форме, получаем
|
(3) |
По математической записи формулируем условия равновесия в аналитической форме для системы сходящихся сил.
Для равновесия твердого тела под действием системы сходящихся сил необходимо и достаточно, чтобы суммы проекций сил системы на оси координат были равны нулю.
В
плоской системе сходящихся сил все силы
лежат в одной плоскости, например XOY,
и третье условие в (3) вырождается в
тождество ![]() .
Отбрасывая его, имеем условия равновесия
для плоской системы сходящихся сил в
аналитической форме:
.
Отбрасывая его, имеем условия равновесия
для плоской системы сходящихся сил в
аналитической форме:
|