Чотирьохполюсники (фазо-відстаючі)
Схема |
K |
T1 |
T2 |
|
1 |
|
|
|
|
|
|
|
1 |
|
|




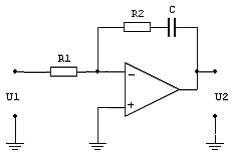
Чотирьохполюсники на активних елементах
Схема |
K |
T1 |
T2 |
|
-1 |
|
|
|
|
|
|
|
|
|
|


Система з двох аперіодичних ланок 1-го порядку
Мета: зняти часові характеристики, виконати математичний аналіз та провести ідентифікацію системи, що складається з двох аперіодичних ланок 1-го порядку.

Вихідні дані для настроювання параметрів стенду сул-3
Вхідна напруга, В |
G |
1 |
|
Коефіцієнт підсилення |
k |
1 |
|
Перша постійна часу, с |
T1 |
0,3 |
|
Друга постійна часу (1/2 варіант), с |
T2 |
0,4 |
0,2 |
Постійна часу для ідентифікації, с |
TX |
TX3 |
|
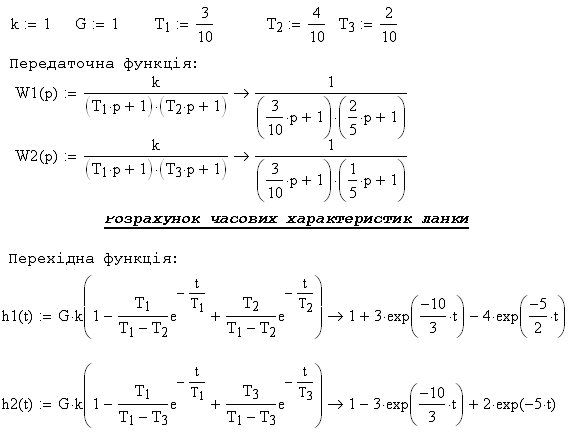
Передаточна функція
має вигляд:
![]()
Диференційне
рівняння ланки:
![]()
Легко бачити, що
ланка з даною передаточною функцією
може розглядатися як послідовне з’єднання
двох аперіодичних ланок: з передаточними
функціями
![]() і
і
![]() .
.
Із взаємної відповідності динамічних характеристик відомо, що перехідна функція може бути знайдена як зворотне перетворення Лапласа частки, діленим якої є передаточна функція, а дільником – оператор р. Тобто:
Знайдемо перехідну функцію. Для цього отриманий дріб розкладемо методом невизначених коефіцієнтів на прості дроби:

З таблиці зворотного перетворення Лапласа видно, що
,
Перетворивши отриману формулу, знаходимо h(t):

![]()
або

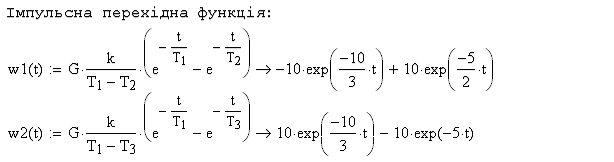
Знайдемо тепер імпульсну перехідну функцію. Як відомо, вона представляє собою похідну від перехідної функції, тобто:

Амплітудно-фазова характеристика може бути отримана шляхом підстановки в передаточну функцію .
![]()


Звідси видно, що
дійсна і уявна частотні характеристики
дорівнюють відповідно:
 ;
;
 .
.
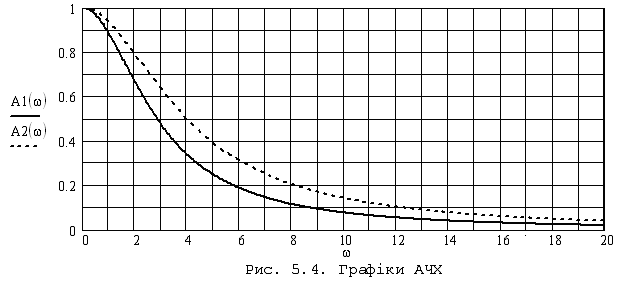
Амплітудно-частотна характеристика представляє собою модуль вектора амплітудно-фазової характеристики і знаходиться за формулою:
Підставивши в дану формулу вирази для та , отримаємо:
=![]()
Проаналізувавши графік функції , можна побачити, що дана ланка має властивості фільтру низьких частот, тобто гармонічні сигнали малої частоти пропускаються ланкою добре, а сигнали великої частоти зазнають сильного ослаблення.
Фазочастотна характеристика може бути отримана за формулою:

Чим більша частота вхідного сигналу, тим більше відставання по фазі вихідного сигналу по відношенню до вхідного. Максимально можливе відставання .
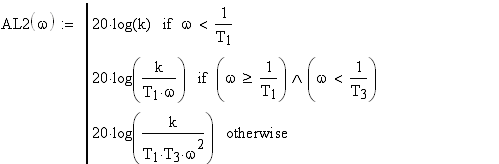
Логарифмічна амплітудно-частотна характеристика описується виразом:

Для знаходження
асимптотичної логарифмічна
амплітудно-частотної характеристики,
задамося умовою, що
![]() .
Перша асимптота при
(
)
представляє пряму, що не має нахилу,
тобто
.
Перша асимптота при
(
)
представляє пряму, що не має нахилу,
тобто
![]() :
:
![]() ,
,
при
![]() – пряму, яка має нахил
:
– пряму, яка має нахил
:
![]()
а при ( ) представляє пряму, яка має нахил :
![]() ,
,
частоти спряження
при цьому:
![]() і
і
![]() .
.