

Ідентифікація ланки

Знявши експериментально,
за допомогою осцилографа, графік
перехідної функції ланки, знайдемо
коефіцієнт передачі
,
коефіцієнт демпфірування
![]() та постійну часу
.
та постійну часу
.
Особливістю перехідного процесу е те, що . Виходячи з цього, обчислимо коефіцієнт передачі ланки, врахувавши, що графік перехідної функції прямує до значення 2:
![]() .
.
По графіку можна визначити ступінь затухання:
![]() .
.
Отже, коефіцієнт демпфірування визначимо з формули:

![]()
Постійна часу, як
відомо, пов’язана з періодом затухання
![]() (на графіку
(на графіку
![]() с) наступним виразом:
с) наступним виразом:
![]() с
с
Моделювання коливальної ланки за допомогою Matlab 6.5
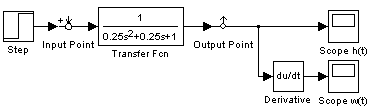
Рис. 7.8. Блок-схема коливальної ланки.
 Рис.
7.9. Вигляд перехідної та імпульсної
характеристик на екрані осцилографу
Simulink.
Рис.
7.9. Вигляд перехідної та імпульсної
характеристик на екрані осцилографу
Simulink.

Рис. 7.10. АЧХ та АФХ коливальної ланки.

Рис. 7.11. ЛАЧХ та ЛФЧХ коливальної ланки.
Приклади технологічних об’єктів
Золотниковий гідропосилювач з жорстким ричажним зворотним зв’язком (Рис. 7.12).
Д инамічні
параметри гідропідсилювача мають
наступні значення: коефіцієнт передачі:
инамічні
параметри гідропідсилювача мають
наступні значення: коефіцієнт передачі:
![]() .
.
Постійна часу:
![]() .
.
Коефіцієнт
відносного затухання:
![]() .
.
При
![]() (
(
![]() )
маємо коливальну ланку, в зворотному
випадку, коли
)
маємо коливальну ланку, в зворотному
випадку, коли
![]() маємо аперіодичну ланку 2-го порядку.
маємо аперіодичну ланку 2-го порядку.
В цих формулах
![]() і
і
![]() – коефіцієнт передачі і постійна часу
золотникового гідропідсилювача без
зворотного зв’язку, обчислюються за
формулами:
– коефіцієнт передачі і постійна часу
золотникового гідропідсилювача без
зворотного зв’язку, обчислюються за
формулами:
![]()

ℓ1, ℓ2 – довжини плеч важеля зворотного зв’язку, м; – максимальний зсув золотника відносно середнього положення, м; – площа поршня, м2; – максимально провідність щілини золотника, кг-0,5·м-3,5; – навантаження на поршень, Н; – тиск рідини на вході, Н/м2; – приведена маса рухомих частин, кг.
Відцентровий тахометр (рис. 7.13).
П редставляє
собою коливальну ланку у випадку, коли
вхідна величина і вихідна відповідно
такі:
редставляє
собою коливальну ланку у випадку, коли
вхідна величина і вихідна відповідно
такі:
– кутова швидкість обертання валу, рад/с;
– переміщення, м.
Передаточна функція:
![]()
Параметри ланки такі:
![]() ,
,
![]() ;
; ![]()
![]() ;
;
![]()
де
![]() ,
,
![]() – довжини важелів, м;
– довжини важелів, м;
![]() – кутова швидкість в установленому
режимі, рад/с;
– кутова швидкість в установленому
режимі, рад/с;
![]() – кутові швидкості, які відповідають
нижньому та верхньому положенню муфти,
рад/с;
– приведена маса рухомих частин, кг;
– кутові швидкості, які відповідають
нижньому та верхньому положенню муфти,
рад/с;
– приведена маса рухомих частин, кг;
![]() – маса одного шару, кг;
– число вантажів;
– маса одного шару, кг;
– число вантажів;
![]() – зсув муфти в установленому режимі
від нижнього положення, м;
– зсув муфти в установленому режимі
від нижнього положення, м;
![]() – максимальне переміщення муфти, м;
– максимальне переміщення муфти, м;
![]() – відстань від вала до шарніра, м;
– коефіцієнт в’язкого тертя, Н·с/м2.
– відстань від вала до шарніра, м;
– коефіцієнт в’язкого тертя, Н·с/м2.
При
![]() відцентровий тахометр є коливальною
ланкою, а в зворотному випадку –
аперіодичною ланкою 2-го порядку.
відцентровий тахометр є коливальною
ланкою, а в зворотному випадку –
аперіодичною ланкою 2-го порядку.
Поплавковий вимірювач рівня рідини (сталого заглиблення) (рис. 7.14).
П ередаточна
функція має вигляд:
ередаточна
функція має вигляд:
![]()
Вхідна величина і вихідна такі:
xвх – рівень води в резервуарі, м;
xвих – переміщення поплавка, м.
Коефіцієнт:
.
Постійні часу:
![]() ,
,
![]() ,
,
де m
– приведена
маса поплавка, кг;
![]() і
і
![]() – густина рідини і тіла відповідно,
кг/м3;
S – площа
поперечного перетину поплавка, м2.
– густина рідини і тіла відповідно,
кг/м3;
S – площа
поперечного перетину поплавка, м2.
При
![]() маємо коливальну ланки, в зворотному
випадку – аперіодичну 2-го порядку.
маємо коливальну ланки, в зворотному
випадку – аперіодичну 2-го порядку.
Поплавковий вимірювач рівня рідини (змінного заглиблення) (рис. 7.15).
В хідна
величина і вихідна такі:
хідна
величина і вихідна такі:
xвх – рівень води в резервуарі, м;
xвих – переміщення поплавка, м.
Коефіцієнт:
![]() .
.
Постійні часу:
![]() ,
,
![]() ,
,
де m – приведена маса поплавка, кг; і – густина рідини і тіла відповідно, кг/м3; S – площа поперечного перетину поплавка, м2.
При виконанні
умови
![]() даний поплавок представляє собою
коливальну ланку, в зворотному випадку
– аперіодичну 2-го порядку.
даний поплавок представляє собою
коливальну ланку, в зворотному випадку
– аперіодичну 2-го порядку.