

Ідентифікація ланки

Знявши експериментально, за допомогою осцилографа, графік перехідної функції даної ланки, знайдемо коефіцієнт передачі та постійну часу , якщо с.
Особливістю перехідного процесу є те, що має екстремум в точці:
Постійну часу
знайдемо за допомогою номограми (рис.
6.8). На графіку можна бачити, що
![]() с.
Знайшовши криву, що відповідає значенню
,
проводимо пряму, паралельну осі абсцис,
на рівні 0,7 і на перетині з графіком
функції одержали другу постійну часу
с.
с.
Знайшовши криву, що відповідає значенню
,
проводимо пряму, паралельну осі абсцис,
на рівні 0,7 і на перетині з графіком
функції одержали другу постійну часу
с.
Коефіцієнт передачі знайдемо з рівняння:
 .
.

Моделювання система з реальної диференцюючої ланки та аперіодичної 1-го порядку за допомогою Matlab 6.5
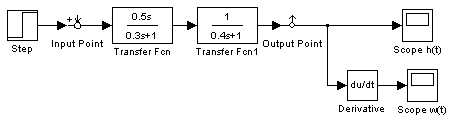
Рис. 6.9. Блок-схема послідовного з’єднання реальної диференцюючої ланки та аперіодичної ланки першого порядку.

Рис. 6.10. Вигляд перехідної та імпульсної характеристик на екрані осцилографу Simulink.

Рис. 6.11. АЧХ та АФХ системи, що складається з реальної диференцюючої ланки та аперіодичної ланки першого порядку.

Рис. 6.12. ЛАЧХ та ЛФЧХ системи, що складається з реальної диференцюючої ланки та аперіодичної ланки першого порядку.
Приклади електромеханічних пристроїв
Вимірювач лінійної швидкості з трансформатором (Рис. 6.13).
В даному датчику вхідна величина є
переміщенням повзунка реостата, а
вихідна – напруга на вторинній обмотці
трансформатору.
даному датчику вхідна величина є
переміщенням повзунка реостата, а
вихідна – напруга на вторинній обмотці
трансформатору.
Передаточна функція має вмгляд:
![]()
Коефіцієнт передачі та постійні часу мають наступні значення:
![]()
![]()
![]()
де
![]() – індуктивності первинної та вторинної
обмоток трансформатора, Гн;
– індуктивності первинної та вторинної
обмоток трансформатора, Гн;
![]() – коефіцієнт взаємоіндукції, Гн.
– коефіцієнт взаємоіндукції, Гн.
Для даного датчика необхідне виконання умови:
![]()
Тоді його можна розглядати як послідовне з’єднання реальної диференцюючої ланки та аперіодичної ланки 1-го порядку.
Чотирьохполюсники
Схема |
W(p) |
T1 |
T2 |
|
|
R1C1 |
R2C2 |
|
|
R1C1 |
R2C2 |

Зауваження: щоб вказані чотирьохполюсники представляли собою ланку з передаточною функцією:
необхідно виконання
такої умови:
![]()
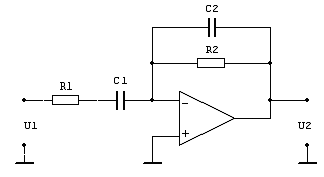
Чотирьохполюсники на активних елементах
Схема |
K |
T1 |
T2 |
|
|
|
|
Коливальна ланка
Мета: зняти часові характеристики, виконати математичний аналіз та провести ідентифікацію коливальної ланки.

Дану ланку можна змоделювати такою системою:

Передаточна функція схеми має вигляд:
![]() ,
де
,
де
![]()
 .
.
Умова коливальності ланки має вигляд:
![]() .
.
Тобто, задавшись певним значенням постійної часу аперіодичної ланки треба коефіцієнт підсилення збільшити доти, поки система не стане коливальною.
Звідси видно, що параметри коливальної ланки виражаються через параметри даної системи наступним чином:
![]() ,
,
![]() .
.