

Ідентифікація ланки

Знявши експериментально, за допомогою осцилографа, графік перехідної функції даної ланки, знайдемо коефіцієнт передачі та постійну часу .
Особливістю
перехідного процесу є те, що
![]() ,
тобто графік при великих
,
тобто графік при великих
![]() перетворюється в пряму.
перетворюється в пряму.
Отже, постійну часу знайдемо, продовживши прямолінійну ділянку перехідної функції. Ця пряма перетне вісь часу в точці , а її коефіцієнт нахилу буде коефіцієнтом передачі ланки.
З графіка легко можна бачити, що с, а .
Моделювання інерційної інтегруючої ланки за допомогою Matlab 6.5.

Рис. 3.8. Блок-схема реальної інтегруючої ланки.
 Рис.
3.9. Вигляд перехідної та імпульсної
характеристик.
Рис.
3.9. Вигляд перехідної та імпульсної
характеристик.
Рис. 3.10. АЧХ та АФХ реальної інтегруючої ланки.
Рис. 3.11. ЛАЧХ та ЛФЧХ реальної інтегруючої ланки.
Приклади технологічних об’єктів
Резервуар з рідиною (Рис. 3.12).
П редставляє
собою ідеальну інтегруючу ланку у
випадку, коли вхідна і вихідна величини
відповідно такі:
редставляє
собою ідеальну інтегруючу ланку у
випадку, коли вхідна і вихідна величини
відповідно такі:
![]() – кількість рідини,
що затікає в одиницю часу, м3/с;
– кількість рідини,
що затікає в одиницю часу, м3/с;
– рівень води в резервуарі, м.
Коефіцієнт:
![]() ,
м-2
,
м-2
де S – площа поверхні води в резервуарі, м2.
Золотникового підсилювач (Рис. 3.13).
Н а
рис. стрілками показаний напрямок
рідини, що створює тиск нагнітання Рн
та зливу РЗ.
а
рис. стрілками показаний напрямок
рідини, що створює тиск нагнітання Рн
та зливу РЗ.
Коефіцієнт передачі та постійна часу мають наступні значення:
![]()

де
![]() – максимальний зсув золотника відносно
середнього положення, м;
– максимальний зсув золотника відносно
середнього положення, м;
![]() – площа поршня, м2;
– площа поршня, м2;
![]() –
максимально
провідність щілини золотника, кг-0,5·м-3,5;
–
максимально
провідність щілини золотника, кг-0,5·м-3,5;
![]() – навантаження на поршень, Н;
– навантаження на поршень, Н;
![]() – тиск
рідини на вході, Н/м2;
– тиск
рідини на вході, Н/м2;
![]() – приведена маса рухомих частин, кг.
– приведена маса рухомих частин, кг.
ГВМ мембранного типу (Рис. 3.14).
К оефіцієнт
передачі та постійна часу мають такі
значення:
оефіцієнт
передачі та постійна часу мають такі
значення:
![]()
![]()
де
![]() – внутрішній діаметр трубки гідропроводу,
м;
– внутрішній діаметр трубки гідропроводу,
м;
![]() –повна
довжина гідропроводу, м;
–
динамічна маса всіх
–повна
довжина гідропроводу, м;
–
динамічна маса всіх
рухомих елементів,
включаючи масу рідини в ГВМ та масу
навантаження, кг;
![]() – діаметр мембрани, м.
– діаметр мембрани, м.
Двохфазний асинхронний двигун (Рис. 3.15).
П редставляє
собою інтегруючу ланку у випадку, коли
вхідна і вихідна величини відповідно
такі:
редставляє
собою інтегруючу ланку у випадку, коли
вхідна і вихідна величини відповідно
такі:
![]() – напруга керування,
В;
– напруга керування,
В;
![]() – кут повороту
вала двигуна, рад.
– кут повороту
вала двигуна, рад.
Коефіцієнт:
![]() ,
°/(В*с)
,
°/(В*с)
де nн – частота обертів номінальна, об/с
Постійна часу:
![]() ,
с
,
с
де J – динамічний момент інерції вала, кг*м2; МП – номінальне значення пускового моменту, Н*м.
Чотирьохполюсники на активних елементах
Схема |
K |
T |
|
|
|

В даному випадку приведена ідеальна інтегруюча ланка з передаточною функцією
![]()
Але підключивши до цього підсилювача будь-яку аперіодичну ланку 1-го порядку легко одержати різноманітні реальні інтегруючі ланки.
Інтегро–диференцююча ланка
Мета: зняти часові характеристики, виконати математичний аналіз та провести ідентифікацію інтегро-диференцюючої ланки.

Вихідні дані для настроювання параметрів стенду сул-3
Вхідна напруга, В |
G |
1 |
|
Коефіцієнт підсилення |
k |
1 |
|
Перша постійна часу, с |
T1 |
0,3 |
|
Друга постійна часу (1/2 варіант), с |
T2 |
0,4 |
0,2 |
Постійна часу для ідентифікації, с |
TX |
TX3 |
|
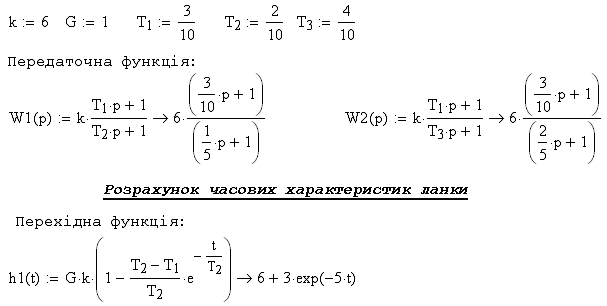
Передаточна функція
має вигляд:
![]()
Диференційне
рівняння ланки:
![]()
Легко бачити, що ланка з даною передаточною функцією може розглядатися як послідовне з’єднання двох ланок: ізодромної та аперіодичної першого порядку.
Із взаємної відповідності динамічних характеристик відомо, що перехідна функція може бути знайдена як зворотне перетворення Лапласа частки, діленим якої є передаточна функція, а дільником – оператор р. Тобто:
Знайдемо перехідну функцію. Для цього отриманий дріб розкладемо методом невизначених коефіцієнтів на прості дроби:
![]()
З таблиці зворотного перетворення Лапласа видно, що
,
Перетворивши отриману формулу, знаходимо h(t):
 ,
або
,
або

Знайдемо тепер імпульсну перехідну функцію. Як відомо, вона представляє собою похідну від перехідної функції, тобто:

Амплітудно-фазова характеристика може бути отримана шляхом підстановки в передаточну функцію .

Звідси видно, що
дійсна і уявна частотні характеристики
дорівнюють відповідно:
 ;
;
![]() .
.
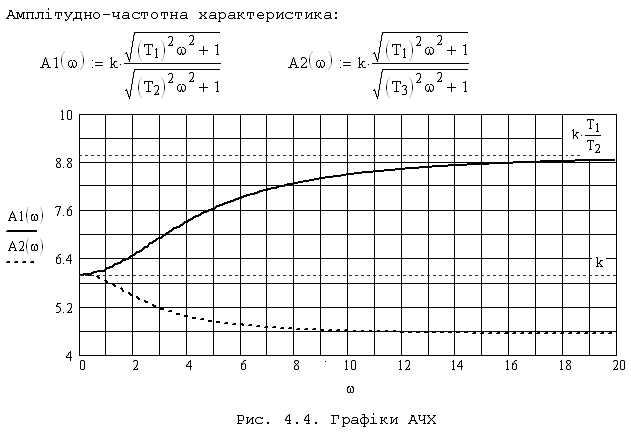
Амплітудно-частотна характеристика представляє собою:
![]()
Підставивши в дану формулу , отримаємо:

Проаналізувавши
графік функції
,
можна побачити, що інтегро–диференціююча
ланка при високих частотах пропускає
гармонійний сигнал, який дорівнює
![]() від вхідного.
від вхідного.

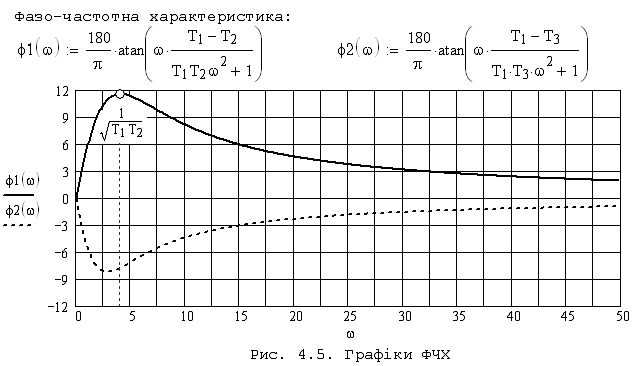
Фазочастотна характеристика може бути отримана за формулою:

При частоті
![]() і
при
дана ланка не вносить фазового здвигу,
проте існує така частота, при якій
фазовий здвиг або максимальний при
,
або мінімальний – при
і
при
дана ланка не вносить фазового здвигу,
проте існує така частота, при якій
фазовий здвиг або максимальний при
,
або мінімальний – при
![]() .
Знайдемо цю екстремальну частоту:
.
Знайдемо цю екстремальну частоту:


![]()
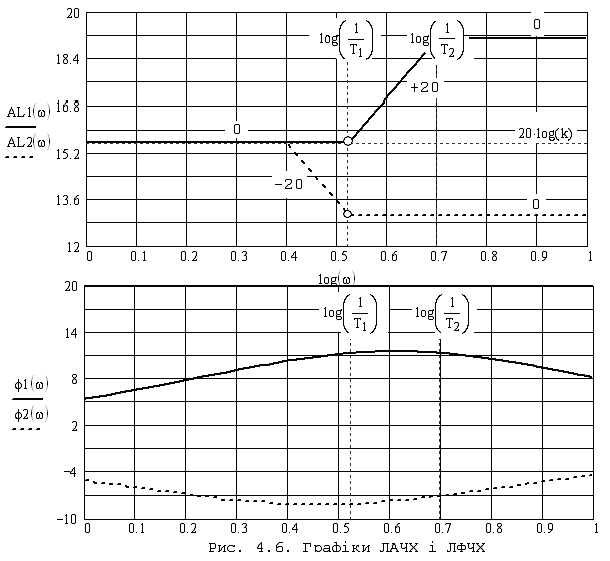
Логарифмічна амплітудно-частотна характеристика описується виразом:
Асимптотична логарифмічна амплітудно-частотна характеристика характеризується тим, що її перша асимптота при представляє пряму, що йде паралельно осі . Задамося умовою, що . Маємо:
![]() ,
,
при
![]() представляє пряму, яка має нахил
представляє пряму, яка має нахил
![]() (або
при
(або
при
![]() ):
):
![]() ,
,
а при представляє пряму, що йде паралельно осі .
![]() .
.





Ідентифікація ланки

Знявши експериментально,
за допомогою осцилографа, графік
перехідної функції даної ланки, знайдемо
коефіцієнт передачі
та постійну часу
![]() ,
якщо
,
якщо
![]() с.
с.
Особливості перехідного процесу:
1)
![]() ;
;
2)
![]() .
.
Отже, коефіцієнт передачі знайдемо із співвідношення:
![]()
Постійна часу, очевидно з графіка, дорівнює:
![]() с.
с.
Моделювання інтегро-диференцюючої ланки за допомогою
Matlab 6.5.
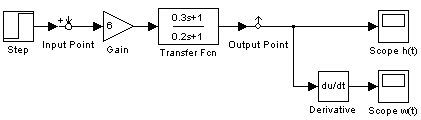
Рис. 4.8. Блок-схема інтегро-диференцюючої ланки.
 Рис.
4.9.
Вигляд перехідної та імпульсної
характеристик на екрані осцилографу
Simulink.
Рис.
4.9.
Вигляд перехідної та імпульсної
характеристик на екрані осцилографу
Simulink.

 Рис.
4.10. Частотні характеристики
інтегро-диференцюючої
ланки.
Рис.
4.10. Частотні характеристики
інтегро-диференцюючої
ланки.
Приклади технологічних об’єктів
Ізодром з важільною системою (Рис. 4.11).
В хідні
та вихідні параметри ланки вказані на
малюнку.
хідні
та вихідні параметри ланки вказані на
малюнку.
Коефіцієнт передачі для даного пристрою:
Постійні часу визначаються за формулами наступним чином:

 ,
,
де ℓ1, ℓ2, ℓ3 – довжини плеч важелів, м; – коефіцієнт в’язкого тертя, Н·с/м2.
Приклади
Чотирьохполюсники (фазо-випереджуючі)
Схема |
K |
T1 |
T2 |
|||
|
|
|
|
|||
|
|
|
|
|||
|
|
|
|
|||
|
|
|
|
|||
|
|
|
|
|||
|
|
|
|
|||
|
|
|
|
|||
|
|
|
|
|||











