

Министерство образования и науки рф
ВОЛОГОДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра автоматики и вычислительной техники
ТЕХНИЧЕСКИЕ СРЕДСВА
АВТОМАТИЗАЦИИ И УПРАВЛЕНИЯ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
К ВЫПОЛНЕНИЮ ЛАБОРАТОРНЫХ РАБОТ
Вологда
2011
Лабораторная работа № 1
ИЗУЧЕНИЕ И ИССЛЕДОВАНИЕ ЛИНЕЙНОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Цель работы: изучение и экспериментальное исследование лабораторной системы автоматического управления. Определение оптимальных параметров управляющего устройства.
Продолжительность работы – 8 часов.
Описание лабораторной установки
Лабораторная установка представляет собой лабораторный комплекс (рис.1), предназначенный для проведения лабораторных работ с применением управляющей ЭВМ, специального программного обеспечения и модели аппаратурных средств цифровой САУ.
В состав комплекса входят:
система управляющая лабораторная СУЛ - 3;
осциллограф;
компьютер;
блок электродвигателя в качестве объекта управления.
Управляющая система сул – 3
Система управляющая предназначена для структурного моделирования системы автоматического управления. Система может использоваться автономно, в комплексе с ЭВМ, а также в комплексе с реальным объектом управления. В автономном режиме реализуется аналоговое моделирование динамических систем с применением встроенного генератора детерминированного и случайного воздействия, вычислителя оценок качества управления и измерительного устройства. В комплекте с ЭВМ реализуется модель цифровой системы с непрерывным объектом управления. При моделировании могут создаваться замкнутые (с отрицательной обратной связью) и разомкнутые системы. В качестве объекта управления может использоваться реальный физический объект, имеющий аналоговый вход и датчик, имеющий аналоговый выход.
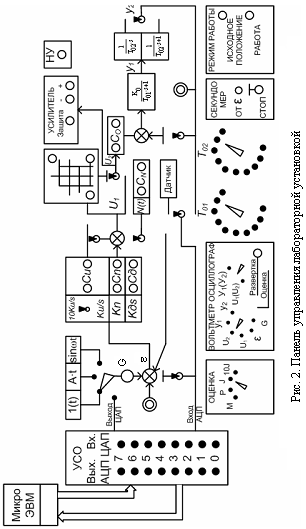
Рис. 1. Укрупненная функциональная схема лабораторного комплекса
Система содержит:
панель управления;
устройство связи с объектом;
аналоговое управляющее устройство (АУУ);
модель объекта управления (МОУ);
управляющий триггер (Т) для фиксирования режима работы управляющей системы;
измерительное устройство (ИУ) для определения параметров сигналов в цепях управляющей системы;
вычислитель оценки (ВО) качества процесса управления.
Моделирующий комплекс работает в двух режимах:
исходное положение;
работа.
В режиме ИСХОДНОЕ ПОЛОЖЕНИЕ производится задание начальных условий для выходных сигналов, интегрирующих элементов.
В режиме РАБОТА производится моделирование переходных процессов. Индикация режима производится с помощью включения цифрового табло секундомера. В режиме РАБОТА табло светится, в режиме ИСХОДНОЕ ПОЛОЖЕНИЕ – отключается.
Панель управления (рис.2) содержит следующие группы органов индикации и управления:
переключатели, потенциометры и кнопки, с помощью которых задается структура и параметры аналогового управляющего устройства и модели объекта управления;
кнопки управления РАБОТА и ИСХОДНОЕ ПОЛОЖЕНИЕ для переключения триггера;
светодиоды индикации цифровых кодов аналого-цифрового и цифро-аналогового преобразователей (ВХОД ЦАП и ВЫХОД АЦП), входящих в состав УСО;
органы управления и индикации измерительного устройства (вольтметр, секундомер, схема управления индикатором, переключатель вольтметра и индикатора);
светодиоды индикации полярности сигнала на выходе усилителя мощности и срабатывания его схемы защиты.
При пользовании органами управления следует руководствоваться следующими правилами:
соединение связей производится установкой соответствующих тумблеров в верхнее положение или установкой “клювиков” переключателей в сторону замыкания линии;
увеличению коэффициентов передачи потенциометров соответствует вращение их ручек по часовой стрелке;
контролируемые потенциометры снабжены кнопками, при нажатии которых коэффициент передачи индицируется вольтметром (единичному коэффициенту передачи потенциометра соответствует отклонение стрелки до сотого деления).
Устройство связи с объектом (УСО) обеспечивает связь моделирующего блока с ЭВМ. Подключение УСО производится к разъему устройства байтового параллельного интерфейса (УБПИ). УСО содержит входной восьмиразрядный параллельный регистр, состояние которого высвечивается линейкой светодиодов с надписью ВХОД ЦАП. На вход данного регистра поступает вырабатываемый в ЭВМ код управляющего воздействия. Фиксирование кода управляющего воздействия происходит при появлении управляющего сигнала, поступающего с ЭВМ. Выходной сигнал регистра поступает на вход ЦАП, где преобразуется в аналоговый сигнал задающего воздействия. ЦАП, применяемый в УСО, имеет смещенную статическую характеристику, позволяющую обойтись без знакового разряда.
Нулевому значению цифрового кода соответствует выходной сигнал ЦАП, равный –10 В. Значению 127 соответствует нулевой выходной сигнал ЦАП. Значению цифрового кода 255 соответствует выходной сигнал ЦАП, равный +10 В.
В аналогово-цифровом преобразователе (АЦП) производится преобразование аналогового сигнала управляемой величины в восьмиразрядный цифровой код, поступающий затем в ЭВМ. АЦП имеет смещенную статическую характеристику, обратную по отношению к характеристике ЦАП.
Входной код АЦП индицируется линейкой светодиодов с надписью ВЫХОД АЦП.
В процедурах программного обеспечения лабораторных работ также предусмотрено соответствующее смещение кодов принимаемых и передаваемых сигналов. Таким образом, значению программной переменной +1 соответствует значение сигнала в моделирующем блоке +10 В, значению –1 соответствует значение сигнала –10 В.
Прием информации от ЭВМ и передача информации в ЭВМ осуществляется периодически с частотой 10 Гц. Таким образом, УСО в течение 50 мс находится в состоянии приема информации и 50 мс в состоянии передачи информации. В момент передачи информации в ЭВМ состояние АЦП фиксируется, и его выходной код остается постоянным. После передачи информации в ЭВМ производится вычисление текучего цикла формирования управляющего воздействия. Суммарное время передачи и вычислений не должно превышать 50 мс, что накладывает определенные ограничения на объем вычислительных операций, выполняемых в реальном масштабе времени. При приеме информации от ЭВМ происходит фиксирование кода задающего воздействия во входном регистре. В этот же момент производится измерение с помощью АЦП сигнала управляемой величины. Временные интервалы приема и передачи информации формируются задающим генератором УСО. В ЭВМ из УСО поступают сигналы разрешения приема и передачи информации. Один цикл приема – передачи информации равен 0,1 с и является минимальным значением периода квантования Тк для исследуемой системы автоматического управления. Следует помнить, что кроме квантования сигнала в рассматриваемой системе присутствует транспортная задержка τ, приблизительно равная половине периода квантования Тк (τ = 51÷53 мс). Для получения больших значений периода квантования программным путем реализуется пропуск циклов приема-передачи сигналов. При этом величина задержки τ остается постоянной. Для автоматического запуска и останова моделирующего блока служит схема выделения дискретных команд (СВДК). В момент записи информации в приемный регистр УСО вырабатывается команда ПУСК, фиксируемая управляющим триггером (Т) и переводящая моделирующий блок в состояние РАБОТА. При троекратном повторении команды записи в пределах одного цикла приема информации от ЭВМ СВДК вырабатывает команду СТОП, переводящую моделирующий блок в состояние ИСХОДНОЕ ПОЛОЖЕНИЕ.
Аналоговое управляющее устройство (АУУ) состоит из следующих основных блоков (рис. 3):
задающие устройства;
устройства сравнения;
интегрирующего, пропорционального и дифференцирующего блоков;
источника случайного сигнала;
выходного сумматора;
нелинейного элемента.
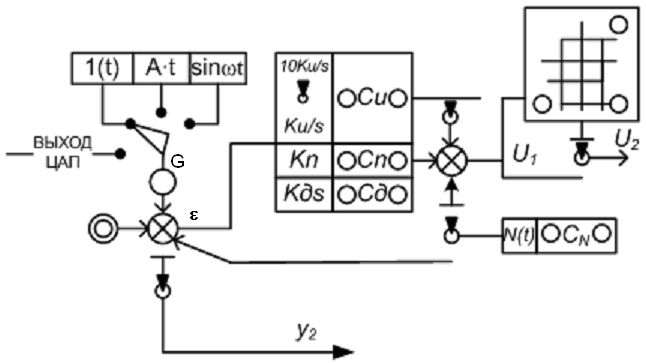
Рис.3. Структурная схема аналогового управляющего устройства
Задающее устройство позволяет формировать следующие сигналы задающего воздействия:
![]() ;
;
![]() ;
;
![]() ,
,
где
![]() р/с
– круговая частота.
р/с
– круговая частота.
Амплитуда задающего воздействия регулируется потенциометром и устанавливается при подключении вольтметра к точке G. В качестве задающего воздействия может использоваться выходной сигнал ЦАП. В этом случае код задающего воздействия формируется программным способом в ЭВМ.
Устройство сравнения служит для формирования сигнала рассогласования
![]()
где
![]()
![]() - случайный сигнал помехи;
- случайный сигнал помехи;
![]() -
сигнал управляемой величины, поступающий
по цепи
-
сигнал управляемой величины, поступающий
по цепи
отрицательной обратной связи.
Интегрирующий, пропорциональный, дифференцирующий блоки и выходной сумматор позволяют реализовать передаточную функцию управляющего устройства
![]() ,
,
где s – оператор Лапласа;
![]() – изображение
сигнала управляющего воздействия;
– изображение
сигнала управляющего воздействия;
![]() ;
;
![]() – коэффициент передачи интегрирующего
блока;
– коэффициент передачи интегрирующего
блока;
![]() –
коэффициент
передачи потенциометра интегрирующего
блока
–
коэффициент
передачи потенциометра интегрирующего
блока
![]() ;
;
![]() =
1 - коэффициент передачи пропорционального
блока;
=
1 - коэффициент передачи пропорционального
блока;
![]() – коэффициент
передачи потенциометра пропорционального
– коэффициент
передачи потенциометра пропорционального
блока
![]() ;
;
![]() – коэффициент
передачи дифференцирующего блока;
– коэффициент
передачи дифференцирующего блока;
![]() – коэффициент
передачи потенциометра дифференцирующего
– коэффициент
передачи потенциометра дифференцирующего
блока
![]() .
.
Источник случайного сигнала позволяет подавать случайный сигнал возмущающего воздействия в устройство сравнения или в выходной сумматор. Амплитуда случайного сигнала регулируется соответствующим потенциометром.
Нелинейный элемент позволяет реализовать гистерезисную статическую характеристику. Ширина петли В характеристики может задаваться в пределах от 0 до 10 В соответствующим потенциометром; контроль производится по осциллографу. При задании В = 0 нелинейный элемент реализует статическую характеристику компаратора. Знак выходного сигнала нелинейного элемента индицируется светодиодами, расположенными около изображения статической характеристики.
При
отключении нелинейного элемента с
помощью тумблера реализуется линейная
зависимость сигнала управляющего
воздействия от сигнала рассогласования.
Диапазон измерения сигнала управляющего
воздействия равен
![]() .
.
Модель объекта управления (рис.4) реализует следующие передаточные функции:
![]() ;
;
![]() ,
,
где
![]() – постоянный коэффициент передачи
объекта управления;
– постоянный коэффициент передачи
объекта управления;
![]() –
коэффициент
передачи потенциометра модели
–
коэффициент
передачи потенциометра модели
![]() ;
;
![]() ,
,
![]() –
постоянные времени, для которых могут
задаваться следующие дискретные
значения: 0; 0,01; 0,02; 0,05; 0,1; 0,25; 0,5 и 1 с.
–
постоянные времени, для которых могут
задаваться следующие дискретные
значения: 0; 0,01; 0,02; 0,05; 0,1; 0,25; 0,5 и 1 с.
Постоянным
времени
и
могут
присваиваться неизвестные значения.
Эти значения задаются индивидуально
для каждого экземпляра моделирующего
блока с помощью дополнительных постоянных
конденсаторов. При неизвестных значениях
постоянных времени могут проводиться
лабораторные работы по экспериментальному
определению параметров объекта
управления. Для задания неизвестных
значений необходимо установить
переключатели
и
в положение
![]() или
или
![]() ,
,
![]() или
или
![]() .
Для переменной модели Y2
могут
задаваться ненулевые значения начальных
условий. Напряжение начальных условий
вводится с помощью потенциометра НУ
при включении соответствующего тумблера.
.
Для переменной модели Y2
могут
задаваться ненулевые значения начальных
условий. Напряжение начальных условий
вводится с помощью потенциометра НУ
при включении соответствующего тумблера.
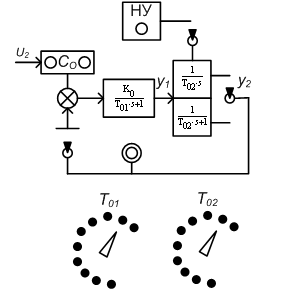
Рис.4. Структурная схема модели объекта управления
Постоянным
времени
![]() и
могут присваиваться неизвестные
значения. Эти значения задаются
индивидуально для каждого экземпляра
моделирующего блока с помощью
дополнительных постоянных конденсаторов.
При неизвестных значениях постоянных
времени могут проводиться лабораторные
работы по экспериментальному определению
параметров объекта управления. Для
задания неизвестных значений необходимо
установить переключатели
и
в положение
и
могут присваиваться неизвестные
значения. Эти значения задаются
индивидуально для каждого экземпляра
моделирующего блока с помощью
дополнительных постоянных конденсаторов.
При неизвестных значениях постоянных
времени могут проводиться лабораторные
работы по экспериментальному определению
параметров объекта управления. Для
задания неизвестных значений необходимо
установить переключатели
и
в положение
![]() или
или
![]() ,
,
![]() или
или
![]() .
Для переменной модели Y2
могут
задаваться ненулевые значения начальных
условий. Напряжение начальных условий
вводится с помощью потенциометра НУ
при включении соответствующего тумблера.
.
Для переменной модели Y2
могут
задаваться ненулевые значения начальных
условий. Напряжение начальных условий
вводится с помощью потенциометра НУ
при включении соответствующего тумблера.
Вычислитель оценок (ВО) предназначен для определения оценок качества переходных процессов:
- оценки математического ожидания ошибки (положение переключателя вычислителя М)
![]() ;
;
- оценки дисперсии ошибки (положение переключателя вычислителя D)
![]() ;
;
- интегральной оценки (положение переключателя вычислителя J)
 ,
,
где τ – постоянная времени интегратора (τ = 4 с);
ТМ – время наблюдения, в течение которого наблюдается оценка;
КJ – постоянный коэффициент, принимающий значение 1 (при положении переключателя J) или 10 (при положении переключателя 10J).
Измерительное устройство содержит секундомер, вольтметр с автоматическим переключением полярности измеряемого сигнала и органы управления индикатором. Секундомер предназначен для измерения времени переходного процесса или других временных интервалов в диапазоне от 0,1 до 99,9 с с дискретностью 0,1 с. Для измерения времени переходного процесса вход секундомера подключается к точке ε. При этом отсчет времени переходного процесса начинается с момента перехода блока в состояние РАБОТА до момента, когда модуль сигнала рассогласования в точке ε станет меньше значения 0,5 В. В случае, если в качестве критерия окончания времени переходного процесса используется другой сигнал, останов секундомера производится вручную с помощью тумблера «От ε/СТОП». Вольтметр предназначен для измерения сигналов в контрольных точках моделирующего блока и калибровки потенциометров. Для калибровки потенциометра нажимается расположенная рядом с ним кнопка, при этом вольтметр показывает коэффициент передачи потенциометра. Сотому делению шкалы вольтметра соответствует единичный коэффициент передачи потенциометра, нулевому делению – нулевой. Для измерения сигналов вольтметр подключается к контрольным точкам моделирующего блока с помощью переключателя, имеющего соответствующее обозначение. К этим же точкам подключается осциллограф и самописец через разъем на задней панели моделирующего блока. Осциллограф может работать в следующих режимах:
построение графика измеряемой величины по оси времени (диапазон периода развертки от 2 до 20 с), переключатель режимов развертки в положении РАЗВЕРТКА;
наблюдение статической характеристики нелинейного элемента, переключатель в положении U2(U 1);
наблюдение фазовой траектории объекта управления, переключатель в положении Y1(Y2).
Управление разверткой производится от встроенного генератора. Осциллограф должен использоваться в режиме усиления входных сигналов горизонтального (X) и вертикального (Y) отклонения луча.
Усилитель мощности служит для усиления сигналов, подаваемых на реальный объект управления, имеющий электрический вход. Усилитель мощности (рис.5) имеет схему защиты по току нагрузки и по сигналам концевых контактов, фиксирующих крайние положения рабочего органа управления. Срабатывание схемы защиты индицируется светодиодом «Защита». Полярность управляющего воздействия индицируется светодиодами «+» и «-».
Регулирующим элементом усилителя является пара встречно– параллельно включенных тиристоров. Управляются тиристоры от широтно–импульсного модулятора ШИМ, синхронизируемого переменным питающим напряжением. Таким образом, для двигателей постоянного тока объекта управления реализуется режим однополупериодного импульсного управления. Для защиты двигателя по току используется пороговый элемент, на вход которого подается сигнал с балластного резистора защиты R3. В случае, если ток двигателя превосходит предельно–допустимое значение, на выходе порогового элемента выделяется импульс, который расширяется в одновибраторе (ОВ) и, поступая на вход запрета V мультиплексора МХ, вызывает отключение входа ШИМ от источника сигнала. При этом загорается светодиод «Защита». Если причина, вызвавшая перегрузку электродвигателя, не устранена, то цикл защиты повторяется периодически, о чем свидетельствует периодическое зажигание светодиода «Защита». Для ограничения перемещения объекта управления в усилитель вводятся сигналы концевых датчиков K 1.1, K 1.2. Если объект управления занимает одно из крайних положений, сигнал соответствующего концевого датчика поступает на управляющий вход мультиплексора МХ (A1 или A2). В результате этого вход ШИМ подключается к источнику сигнала через нелинейный элемент, пропускающий только отрицательный или только положительный сигнал, то есть сигнал того знака, при котором возможен выход объекта управления из крайнего положения. Индикация данных переключений осуществляется зажиганием светодиода «Защита». Если данный светодиод горит не мигая, следует сделать вывод, что объект управления находится в одном из крайних положений.
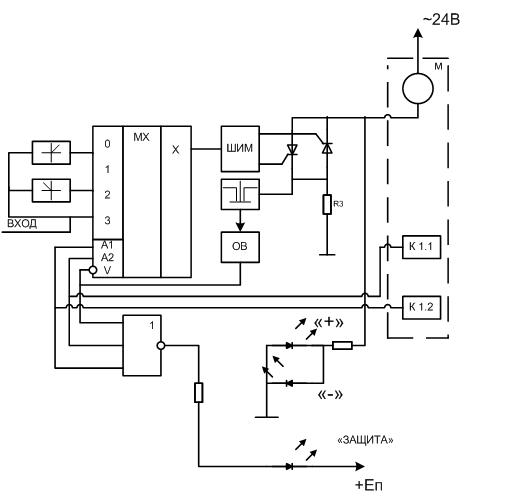
Рис.5. Функциональная схема усилителя мощности
Для индикации управляющего воздействия, подаваемого на электродвигатель, используются светодиоды с обозначением «+» и «-». Если управляющее воздействие не подается, горят оба светодиода. Это свидетельствует об исправности цепей питания электродвигателя. При подаче положительного или отрицательного воздействия остается зажженным светодиод с соответствующим обозначением.
Блок электродвигателя является реальным физическим объектом управления, на который подается управляющее воздействие, и режимы работы могут быть оценены по приборам и визуально.
Данный блок в своем составе содержит:
электродвигатель постоянного тока малой мощности марка СЛ571К с номинальной частотой вращения якоря 2200 об/мин;
тахогенератор типа ТГП–1, установленный соосно с электродвигателем и имеющий коэффициент передачи 5 МВ/об/мин;
блок питания электродвигателя, предназначенный для снабжения энергией якоря электродвигателя и его обмотки возбуждения, а также вырабатывающий синхронизирующее напряжение для широтно-импульсного модулятора усилителя мощности.