

10.Составление уравнения динамики и нахождение динамической характеристики гидравлического резервуара со свободным сливом жидкости
Р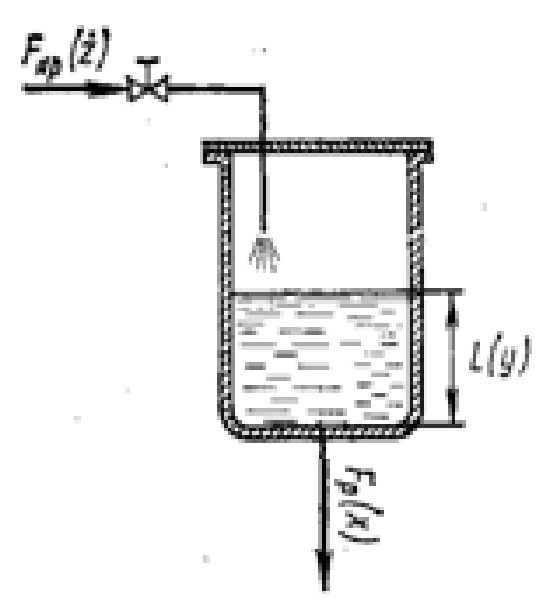 ассмотрим
гидравлический объект, жидкость из
которого отводится самотеком через
вентиль. Выходной величиной объекта
является изменение уровня жидкости L .
а входной - изменение потоков жидкости
на входе Fпр
и выходе Fр.
Найдем уравнение динамики.
ассмотрим
гидравлический объект, жидкость из
которого отводится самотеком через
вентиль. Выходной величиной объекта
является изменение уровня жидкости L .
а входной - изменение потоков жидкости
на входе Fпр
и выходе Fр.
Найдем уравнение динамики.
Материальный баланс объекта определяется равенством
Fпрdt=AdL+Fpdt, где Fпр – количество жидкости, поступившее в объект за время dt; dL – приращение уровня жидкости в аппарате; Fpdt – количество жидкости, выведенное из объекта за время dt; A=conts – площать горизонтального сечения аппарата.
Группируя
слагаемые с выходными величинами в
левой части, а слагаемые с входными
величинами в правой части, получим: A
dL/dt=Fпр-Fр
Выходная величина объекта L
влияет на входную величину Fр
по нелинейному закону: Fр
= αa ,где α
– коэффициент расхода вентиля на линии
отвода жидкости; а – площадь проходного
сечения вентиля; g-
ускорение свободного падения.
,где α
– коэффициент расхода вентиля на линии
отвода жидкости; а – площадь проходного
сечения вентиля; g-
ускорение свободного падения.
Линеанизируем зависимость по методу малых отклонений путем разложения ее в ряд Тейлора в окрестности точки ао, Lo, пренебрегая малостями второго и более высокого порядков.
Р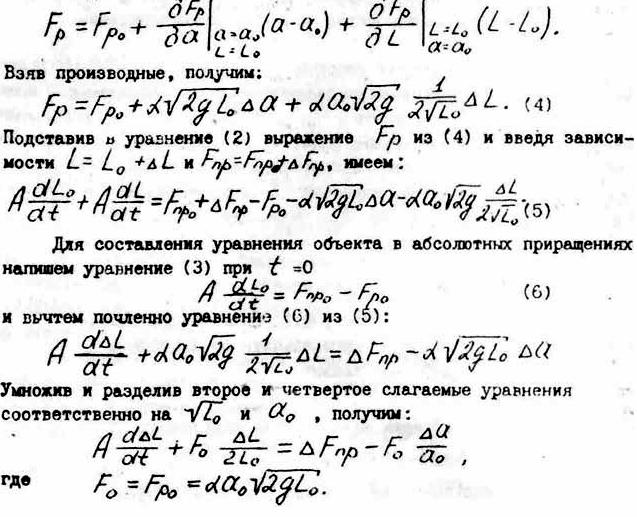 азложение
в ряд Тейлора зависимости Fр=f(α,L)
по α
и L.
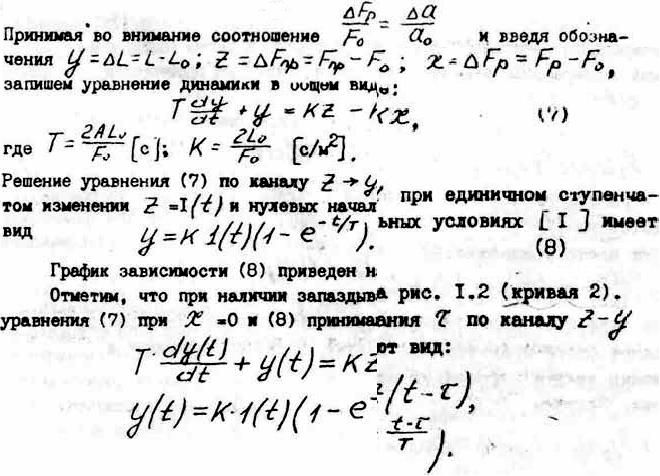
Взяв производные, получим:
азложение
в ряд Тейлора зависимости Fр=f(α,L)
по α
и L.
Взяв производные, получим:
11.Составление уравнения динамики и нахождение динамической характеристики гидравлического резервуара, жидкость из которого откачивается центробежным насосом
Рассмотрим резервуар (см. рис.II-1), из которого насосом откачивается жидкость, причем производительность Fp постоянна.
Д ля
нахождения зависимости уровня жидкости
в аппарате L от входных величин Fпр и Fр
(в м3/с) составим уравнение материального
баланса аппарата: Fпрdt
= dV + Fрdt, где
V – объем жидкости в аппарате, м3; t –
время, с. Отсюда скорость изменения
объема жидкости в аппарате: dV/dt
=Fпр-Fр (1).
ля
нахождения зависимости уровня жидкости
в аппарате L от входных величин Fпр и Fр
(в м3/с) составим уравнение материального
баланса аппарата: Fпрdt
= dV + Fрdt, где
V – объем жидкости в аппарате, м3; t –
время, с. Отсюда скорость изменения
объема жидкости в аппарате: dV/dt
=Fпр-Fр (1).
Скорость изменения уровня жидкости L, если площадь горизонтального сечения аппарата А (в м2) неизменна по высоте dL/dt =(Fпр - Fр)/A (2)
Таким образом, скорость изменения уровня в резервуаре пропорциональна разности потоков жидкости на входе и выходе. Уровень жидкости принимает постоянные значения во времени (скорость dL / dt = 0) только при отсутствии рассогласования потоков Fпр и Fр. Проинтегрируем уравнение (2) в пределах от 0 до t.
Следовательно, выходная величина объекта пропорциональна интегралу от изменения его входных величин. При ступенчатом изменении нагрузки объекта на величину ΔF уровень жидкости L изменяется по зависимости (1): L = (ΔF / A)∙t + L0 (3).
Как следует из уравнения (3), скорость изменения выходной величины при ступенчатом возмущении ΔF постоянна и равна dL / dt = ΔF / A
При расчетах систем автоматизации уравнение динамики объекта представляют в относительных величинах. Предполагая, что Fпр является возмущением, а Fр – регулирующим воздействием (см. рис.II-1), имеем x = ΔL / L0; u = ΔFр / F0; z = ΔFпр / F0 где L0 и F0 – значения соответствующих величин при равновесном состоянии объекта. Запишем уравнение (2) в приращениях dΔL / dt = (ΔFпр - ΔFр) / A и введя относительные величины (L0 / L0)∙(A / F0)∙(dΔL / dt) = (ΔFпр / F0) - (ΔFр / F0), получим уравнение динамики: (AL0 / F0)∙(dx / dt) = z – u (4)
Из уравнения (4) видно, что отношение AL0 / F0 имеет размерность времени. Его называют временем разгона объекта и обозначают через Тε. Заменяя коэффициент в левой части уравнения (4) через Тε, получим уравнение динамики нейтрального объекта первого порядка в общем виде Тε∙(dx / dt) = z – u (5) Интегрируя уравнение (5), найдем To dx/dt+x=kz-ku
В нашем случае u = 0. При единичном ступенчатом возмущении z = 1(t) изменение выходной величины x подчиняется зависимости: x=kz(1-e-t/T)