

14. Позиционные регуляторы. Их особенности
Позиционными (ПЗ) или релейными называют регуляторы, у которых при изменении на входе выходная величина может принимать только определенные, заранее известные значения. Переход от одного из этих значений к другому происходит очень быстро, практически мгновенно.
Особенностью таких АР является то, что они реагируют не на значение регулируемой величины, а на величину отклонения этой величины (на знак отклонения) от заданного значения.
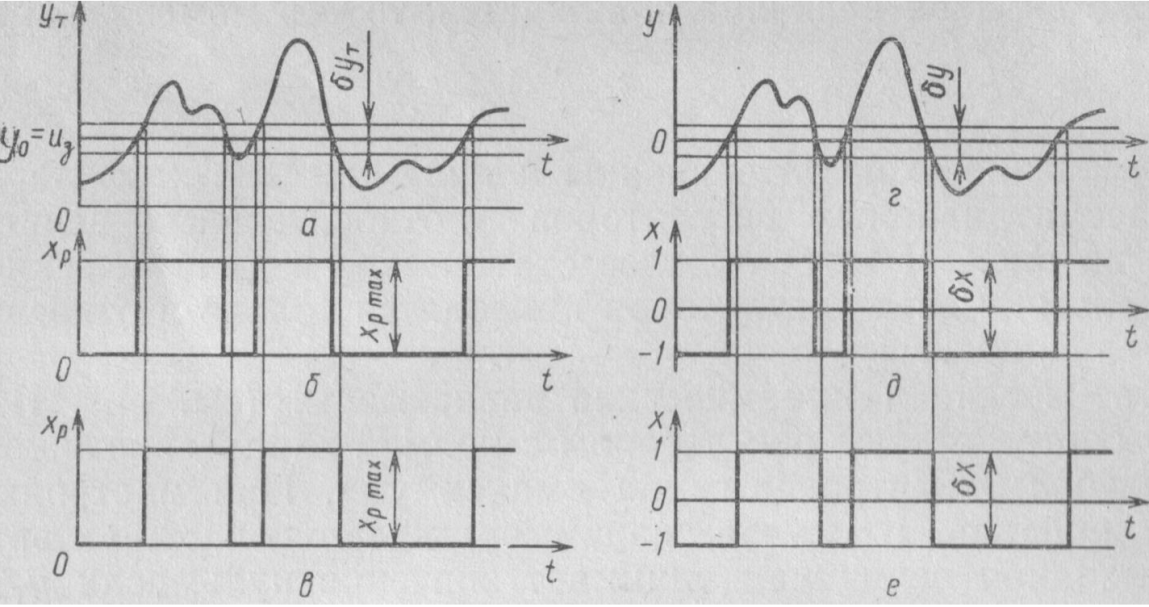
Еще одной особенностью позиционного регулирования является то, что регулируемая величина совершает гармонические колебания.
Статическая и динамическая характеристики
Наибольшее распространение получили двухпозиционные регуляторы, у которых выходная величина может принимать только два значения: минимальное или максимальное.
Hабота идеального (с однозначной характеристикой) Пз-регулятора может быть представлена в виде:

Режим работы позиционного регулятора может быть двояким: АР может быть настроен на минимум или на максимум.
При настройке на минимум реализуется следующий принцип: если текущее значение входной величины утт меньше заданного узд, то выходная величина регулятора u принимает максимальное значение uмах; если же утт больше уздзд, то выходная величина u принимает минимальное значение uminmin. По такому принципу работают все нагревательные приборы (например, утюги). Статическая характеристика имеет вид

При настройке на максимум реализуется следующий принцип: если текущее значение входной величины ут меньше заданного узд, то выходная величина регулятора u принимает минимальное значение umax; если же ут больше узд, то выходная величина u принимает максимальное значение umin. По такому принципу работают все холодильные (например, холодильники). Статическая характеристика имеет вид

Динамическая характеристика имеет вид
Переходный процесс и критерии качества регулирования в системах с позиционными регуляторами
Изменение выходной величины системы во времени с момента нанесения воздействия до прихода ее в новое установившееся состояние называют переходным процессом, т.е. процессом перехода из одного установившегося состояния в другое. Качество позиционного регулирования оценивают по
• Амплитуде колебаний А,
• Периоду колебаний Тк,
• Частоте колебаний ω = 2π / Тк
Иногда происходит смещение колебаний, а за ним и смещение средней линии колебаний относительно заданного значения а0.
Преимущества и недостатки позиционных регуляторов, область применения
Преимущества:
• Просты по конструкции,
• Надежны в работе,
• Несложны в обслуживании и при настройке
Недостаток заключается в том, что в процессе происходят гармонические колебания регулируемой величины. Применяют ПЗ-регуляторы на инерционных объектах с малым запаздыванием.
15.Пропорциональные регуляторы
К П-регуляторам относятся те, у которых выходная величина в пределах зоны регулирования изменяется пропорционально изменению входной величины.
Уравнение динамики
u = kpε + u0, где kp – коэффициент усиления регулятора, u0– выходная величина регулятора в начальный момент времени.
Параметр настройки
Параметром настройки П-регулятора является зона регулирования, или предел пропорциональности δ = kp-1∙100%, под которым понимают диапазон изменения входной величины регулятора, выраженный в процентах от максимального интервала, в пределах которого изменение входной величины приводит к изменению выходной величины регулятора от одного крайнего значения до другого.
Статическая и динамическая характеристика
С татическая
характеристика
пропорционального регулятора –
зависимость выходной величины от
входной.
татическая
характеристика
пропорционального регулятора –
зависимость выходной величины от
входной.
Д инамическая
характеристика
– зависимость выходной величины от
времени при изменении входной величины.
инамическая
характеристика
– зависимость выходной величины от
времени при изменении входной величины.
Динамические характеристики П-регулятора при ступенчатом изменении входного сигнала и различных значениях Кр приведены на рис. 3
Работа регулятора в замкнутом контуре
В связи с наличием жесткой взаимосвязи между изменениями входной и выходной величин П-регулятор обладает высоким быстродействием, что при его работе в замкнутом контуре приводит к малой продолжительности переходного процесса.
Преимущества и недостатки, область применения
К достоинствам пропорционального регулятора следует отнести его безынерционность (или быстродействие). Это выражается в том, что его выходная величина изменяется одновременно с изменением входной величины.
Также П-регулятор прост по конструкции и всегда приводит регулируемую величину в состояние равновесия.
Недостатком П-регулятора является то, что при работе в замкнутом контуре АСР регулятор не возвращает регулируемую величину к заданному значению.
Такие регуляторы применяются, например, в системах вентиляции для поддержания требуемого температурного режима в помещении и могут включать в себя таймер и дистанционное управление.