

3.Понятие об объектах регулирования (ор)
О бъект
регулирования
- это часть технологического объекта
управления, поведение которой
характеризуется одной технологической
величиной.
Цели изучения ОР:
бъект
регулирования
- это часть технологического объекта
управления, поведение которой
характеризуется одной технологической
величиной.
Цели изучения ОР:
Понять задачу оптимизации и регулирования объекта,
Выбрать (на входе) управляемые и (на выходе) управляющие величины,
Определить степени влияния входных величин на выходные - определить внутренние свойства объекта,
Выбрать канал управления.
Одномерные и многомерные ОР, их особенности.
ОР классифицируют:
По количеству выходных величин:
о
 дномерные
имеют одну
выходную величину и описываются одним
уравнением статики и одним уравнением
динамики. Пример – резервуар для
жидкости (рис.II-1), входными величинами
которого являются приход Fпр и расход
Fр жидкости, а выходной величиной –
уровень жидкости L. Увеличение (уменьшение)
Fпр или Fр вызывает изменение уровня L.
Уравнение статики этого объекта L =
f(Fпр, Fр) и уравнение его динамики L =
f(Fпр, Fр, t).
дномерные
имеют одну
выходную величину и описываются одним
уравнением статики и одним уравнением
динамики. Пример – резервуар для
жидкости (рис.II-1), входными величинами
которого являются приход Fпр и расход
Fр жидкости, а выходной величиной –
уровень жидкости L. Увеличение (уменьшение)
Fпр или Fр вызывает изменение уровня L.
Уравнение статики этого объекта L =
f(Fпр, Fр) и уравнение его динамики L =
f(Fпр, Fр, t).
м
 ногомерные
содержат по две, три и более выходных
величины, число уравнений должно
соответствовать числу выходных величин.
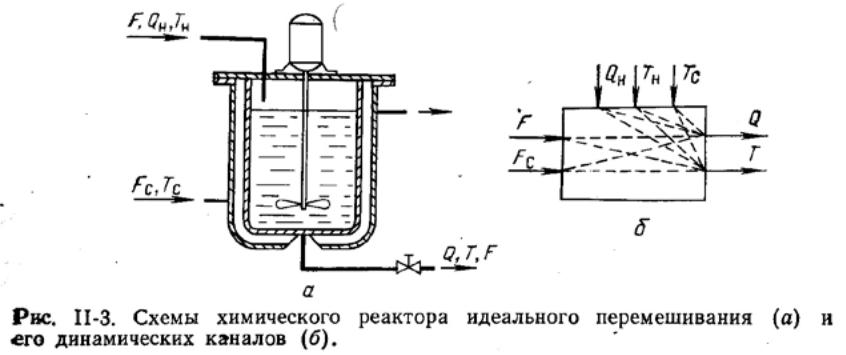
Пример – непрерывно действующий
экзотермический реактор идеального
перемешивания. Схемы реактора и его
динамических каналов приведены на
рис.II-3. Реактор имеет пять входных
величин: концентрация Qн и температура
Тн реагентов на входе в реактор, расход
реагентов в реактор F, а также тепло,
отводимое из реактора системой охлаждения
и определяемое расходом хладагента Fс
и его температурой Тс). Выходными
величинами являются концентрация
продуктов реакции Q и температура в
реакторе Т. Для стабилизации температуры
Т в реакторе изменяют расход хладагента
Fс, а для обеспечения постоянства состава
продуктов реакции Q – расход F реагентов,
подаваемых в реактор. При этом изменение
расхода хладагента Fс вызывает также
изменение состава продуктов реакции
Q, а колебание расхода исходных реагентов
F приводит к изменению температуры Т
реакционной массы в реакторе. Кроме
того, выходные величины реактора (Q и
Т) зависят от концентрации Qн и температуры
Тн входного продукта, а также от
температуры хладагента Тс. Выходные
величины такого реактора находят из
уравнений динамики Q = f1(F, Fc, Qн, Тн, Тс,
t) T = f2(Fc, F, Qн, Тн, Тс, t). Таким образом, обе
выходные величины реактора испытывают
влияние всех его входных величин.
Прохождение сигналов по каждому каналу
может быть выражено своим уравнением
динамики или своей передаточной
функцией.
ногомерные
содержат по две, три и более выходных
величины, число уравнений должно
соответствовать числу выходных величин.
Пример – непрерывно действующий
экзотермический реактор идеального
перемешивания. Схемы реактора и его
динамических каналов приведены на
рис.II-3. Реактор имеет пять входных
величин: концентрация Qн и температура
Тн реагентов на входе в реактор, расход
реагентов в реактор F, а также тепло,
отводимое из реактора системой охлаждения
и определяемое расходом хладагента Fс
и его температурой Тс). Выходными
величинами являются концентрация
продуктов реакции Q и температура в
реакторе Т. Для стабилизации температуры
Т в реакторе изменяют расход хладагента
Fс, а для обеспечения постоянства состава
продуктов реакции Q – расход F реагентов,
подаваемых в реактор. При этом изменение
расхода хладагента Fс вызывает также
изменение состава продуктов реакции
Q, а колебание расхода исходных реагентов
F приводит к изменению температуры Т
реакционной массы в реакторе. Кроме
того, выходные величины реактора (Q и
Т) зависят от концентрации Qн и температуры
Тн входного продукта, а также от
температуры хладагента Тс. Выходные
величины такого реактора находят из
уравнений динамики Q = f1(F, Fc, Qн, Тн, Тс,
t) T = f2(Fc, F, Qн, Тн, Тс, t). Таким образом, обе
выходные величины реактора испытывают
влияние всех его входных величин.
Прохождение сигналов по каждому каналу
может быть выражено своим уравнением
динамики или своей передаточной
функцией.
Объекты с сосредоточенными и распределенными параметрами
Объекты с сосредоточенными параметрами. К ним относятся объекты, регулируемые величины которых имеют одно числовое значение в данный момент времени (уровень жидкости в аппарате, давление газа в газгольдере и др.). Например, резервуар для жидкостей, испаритель, химический реактор.
Объекты с распределенными параметрами. К ним относятся объекты, регулируемые величины которых (температура жидкости по длине теплообменника, концентрации компонентов по высоте ректификационной колонны и др.) имеют разные числовые значения в различных точках объекта в данный момент времени. Например, аппараты типа «труба в трубе», в которых осуществляется теплообмен между жидкостями, массообменные аппараты колонного типа (ректификационные колонны, экстракторы, абсорберы, десорберы), барабанные сушилки для сыпучих материалов, трубчатые реакторы для превращения вещества и др.
Управляемые и управляющие величины объектов
Объект |
Основная управляемая величина |
Вспомогательная (промежуточная) управляемая величина |
Управляющая величина |
Теплообменник |
Тж на входе |
- |
Расход пара |
Сушильный аппарат |
Конечная влажность материала |
Т материала в аппарате |
Расход сушильного агента |
Ректификационная колонна |
Концентрация дистиллята |
Т на контрольной тарелке |
Расход флегмы |
Абсорбер |
Состав обедненного газа |
- |
Расход абсорбента |