

18.Регуляторы с предварением (пд-регуляторы). Уравнение динамики
Кр – коэффициент передачи регулятора
Ти – время интегрирования
Тд – время дифференцирования
u0 – выходная величина регулятора в начальный момент времени.
Параметры настройки
ПД-регулятор имеет два параметра настройки: коэффициент усиления регулятора kр и время дифференцирования Тд.
Динамическая характеристика
И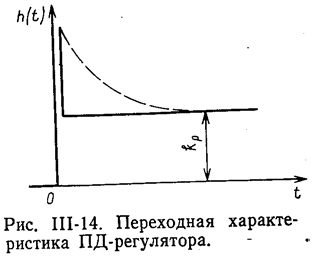
 з
переходной характеристики видно, что
изменение выходной величины происходит
сразу же после изменения величины ε.
С течением времени отклонение и
уменьшается, и величина u становится
постоянной и равной ип в соответствии
со значением предела
пропорциональности
П-составляющей регулятора.
з
переходной характеристики видно, что
изменение выходной величины происходит
сразу же после изменения величины ε.
С течением времени отклонение и
уменьшается, и величина u становится
постоянной и равной ип в соответствии
со значением предела
пропорциональности
П-составляющей регулятора.
Н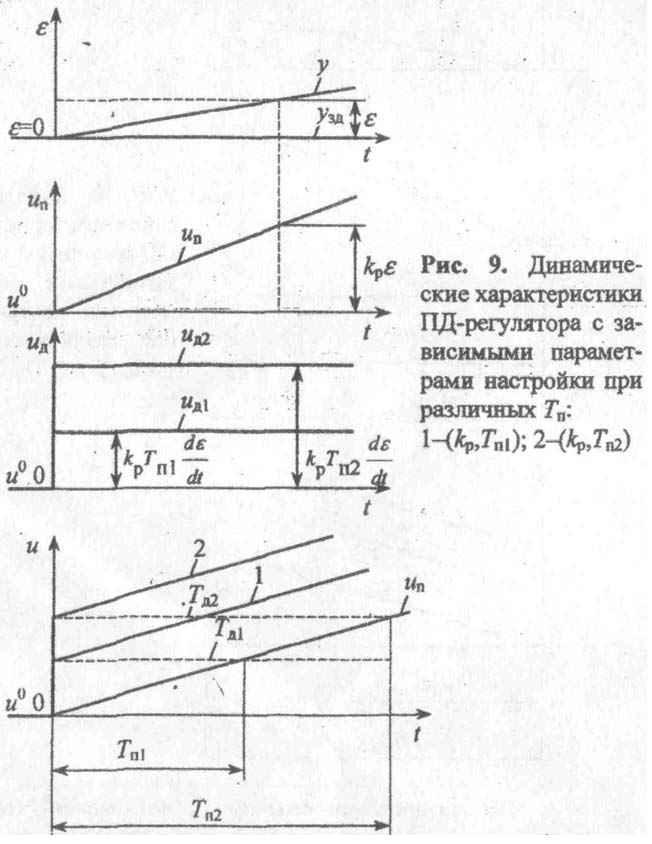 а
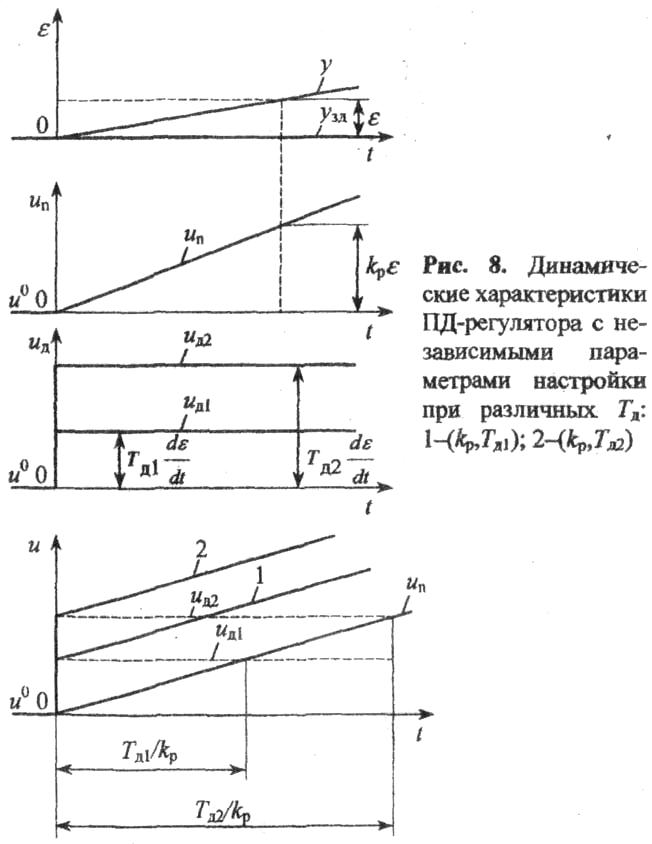
рис. приведена динамическая характеристика
ПД-регулятора для случая, когда входная
величина изменяется с постоянной
скоростью. Для сравнения там же приведена
аналогичная характеристика для
П-регулятора. Выходные величины П- и
ПД-регуляторов изменяются с одинаковой
скоростью, равной k р∙dε/dt, но при
ПД-регуляторе выходная величина всегда
на Тд∙dε/dt больше, чем при П-регуляторе.
По сравнению с uп
выходная величина u достигает тех же
значений с опережением, равным Тд/ kр.
а
рис. приведена динамическая характеристика
ПД-регулятора для случая, когда входная
величина изменяется с постоянной
скоростью. Для сравнения там же приведена
аналогичная характеристика для
П-регулятора. Выходные величины П- и
ПД-регуляторов изменяются с одинаковой
скоростью, равной k р∙dε/dt, но при
ПД-регуляторе выходная величина всегда
на Тд∙dε/dt больше, чем при П-регуляторе.
По сравнению с uп
выходная величина u достигает тех же
значений с опережением, равным Тд/ kр.
ПД-регуляторы с зависимыми и независимыми параметрами настройки
З акон регулирования ПД-регулятора с независимыми параметрами настройки описываемся уравнением
где Тд - время дифференцирования.
Динамическая характеристика ПД-регулятора, описываемого уравнением, при подаче на его вход входного сигнала, изменяющегося с постоянной скоростью ,
dε/dt, представлена на рис. 8.
Уравнение ПД-регулятора с зависимыми параметрами настройки имеет вид
Время предварения - время, в течение которого выходная величина ПД-регулятора под действием пропорциональной составляющей изменяется на такую же величину, как и под действием дифференциальной составляющей. Это видно из динамической характеристики (рис.9).
Работа ПД-регуляторов в замкнутом контуре. Эффект-введения Д-составляющей
При работе в замкнутом контуре АСР введение дифференциальной составляющей в закон регулирования вызывает уменьшение скорости изменения регулируемой величиям, уменьшение времени регулирования и динамической ошибки регулирования, а также интегральной
При наличии в законе регулирования Д-составляющей регулятор реагирует и на изменения скорости входной величины т. е на интенсивность ее изменения; такой регулятор вступает в работу быстрее, чем П-регулятор. Введение в закон регулирования воздействия по производной приводит к усилению влияния регулятора на переходный процесс, при этом сокращается время переходного процесса и уменьшаются колебания регулируемой величины.
Преимущества и недостатки, область применения
Достоинства: небольшое время регулирования, быстро
Недостатки: ПД-регуляторы применяются достаточно редко, т.к. они не могут привести регулируемую величину к точно заданному значению.
19.Пропорционально-интегрально-дифференциальные (пид) регуляторы. Уравнение динамики
Изменение выходной величины ПИД-регуляторов пропорционально отклонению регулируемой величины от заданного значения, интегралу и производной этого отклонения
г![]()
![]() де
kp – коэффициент усиления регулятора;
Ти – время интегрирования; Тд – время
дифференцирования; u0–
выходная величина регулятора в начальный
момент времени.
де
kp – коэффициент усиления регулятора;
Ти – время интегрирования; Тд – время
дифференцирования; u0–
выходная величина регулятора в начальный
момент времени.
Параметры настройки
ПИД - регулятор имеет три параметра настройки: kp – коэффициент усиления регулятора; Ти – время интегрирования; Тд– время дифференцирования, характеризующее степень влияния скорости изменения ε на u регулятора.
Динамическая характеристика
ПИД-регуляторы с независимыми и зависимыми параметрами настройки
З акон
регулирования ПИД-регуляторов с
независимыми и зависимыми параметрами
настройки имеет соответствующие виды:
акон
регулирования ПИД-регуляторов с
независимыми и зависимыми параметрами
настройки имеет соответствующие виды:
где kp – коэффициент усиления регулятора; Ти – время интегрирования; Тиз – время изодрома регулятора; Тд – время дифференцирования, характеризующее степень влияния скорости изменения ε на u регулятора; Тп – время предварения – время, в течение которого выходная величина ПИД-регулятора под действием пропорциональной составляющей изменяется на такую же величину, как и под действием дифференциальной составляющей; u0– выходная величина регулятора в начальный момент времени.
Работа ПИД-регуляторов в замкнутом контуре
В замкнутом контуре ПИД-регулирование приводит к уменьшению скорости dyт/dt и, как следствие этого, к повышению качества регулирования.
Преимущества и недостатки, область применения
К преимуществам можно 1)ПИД-регуляторы позволяют обеспечить более высокий уровень регулирования и их универсальность: используя ПИД-регуляторы, можно получить различные законы регулирования – установив Тд (Тп) = 0, получим ПИ-регулятор, а установив Ти (Тиз) = ∞ и Тд (Тп) = 0, получим П-регулятор. 2) Самое маленькое отклонение регулируемой величины от заданного значения. 3) Всегда приходит к заданному значению.4) Небольшое время регулирования.
Недостатки: сложность их конструкции. Такие регуляторы устанавливают на инерционных объектах со значительным запаздыванием, когда недопустимо остаточное отклонение регулируемой величины от заданного значения.