

3.6.* Общий случай движения свободного твердого тела
Чтобы в общем случае определить положение свобод-ного твердого тела в пространстве относительно непод-вижной системы координат Охуz, свяжем с произвольной точкой А тела, в дальнейшем называемой полюсом, подвижную систему координат Ах1у1z1, которая переме-щается поступательно и оси которой остаются параллель-ными осям неподвижной системы координат Охуz. Положение подвижной системы относительно неподвиж-ной определяется положением ее начала, полюса А, то есть тремя координатами: хА, уА, zА. Относительно подви-жной системы Ах1у1z1 тело совершает сферическое движение (в этой системе точка А неподвижна), и его относительное движение определяется тремя углами Эйлера. Таким образом, шесть равенств
![]()
![]()
![]()
![]()
![]()
![]() (3.47)
(3.47)
определяющих положение полюса А и положение тела относительно подвижной системы координат полностью задают положение тела относительно неподвижной системы координат в каждый момент времени. Поэтому эти равенства называются уравнениями движения свободного твердого тела.
Если
бы в процессе движения углы ψ, θ и φ
остава-лись неизменными, то тело
перемещалось бы поступа-тельно в
соответствии с тремя первыми уравнениями
системы (3.47). Если бы полюс А тела
оставался непод-вижным, то тело двигалось
бы вокруг неподвижной точ-ки А
согласно трем последним уравнениям
системы (3.47). В действительности же в
общем случае движения твердого тела
меняется как положение полюса, так и
углы Эйлера. Поэтому мы можем сказать,
что в общем случае движение твердого
тела в каждый момент време-ни слагается
из поступательного движения, при котором
все точки движутся со скоростями
произвольно выб-ранного полюса А,
и из вращения с мгновенной угловой
скоростью
![]() вокруг мгновенной оси вращения,
прохо-дящей через полюс А.
вокруг мгновенной оси вращения,
прохо-дящей через полюс А.
Для радиуса вектора произвольной точки В относите-льно неподвижной точки О в каждый момент времени справедлива зависимость (рис. 3.39)
,
где - радиус-вектор полюса А, а - постоянный по модулю радиус-вектор точки В относительно полюса А.
П родифференцировав
это равенство по времени, полу-чим
родифференцировав
это равенство по времени, полу-чим
![]() .
.
Здесь
![]() - ско-рость точки В,
- ско-рость точки В,
![]() -
скорость полюса А,
-
скорость полюса А,
![]() -
-
Рис. 3.39 скорость точки В тела при его вращении вокруг мгновенной оси.
Таким образом, мы получили формулу, определяющую скорость произвольной точки В в общем случае движения твердого тела:
![]() .
(3.48)
.
(3.48)
Примеры движения свободного твердого тела: брошенный камень, самолет, проделывающий фигуры высшего пилотажа, артиллерийский снаряд, и т.д.
3.7. Сложное движение точки
3.7.1. Относительное, переносное и абсолютное движения точки
Сложное (составное) движение точки – такое движение, при котором точка одновременно участвует в двух или нескольких видах движения. Например, пассажир, перемещающийся в вагоне движущегося поезда или на палубе плывущего корабля по отношению к условно неподвижной системе отсчета, связанной с землей, совершает сложное движение.
Рассмотрим движущееся тело А и точку М, не при-надлежащую этому телу, а совершающую по отношению к нему некоторое движение (рис. 3.40). Выберем две сис темы координат: неподвижную систему координат О1х1y1z1 в условно неподвижной системе отсчета и систему координат Охуz, которая проведена через некоторую точку тела О и жестко с ним связана. Систему Охуz называют подвижной системой координат.
Движение
точки М
по отношению к неподвижной системе
координат называется абсолютным
и определя-ется
радиус-вектором
![]() ,
а ее скорость
,
а ее скорость
![]() и ускоре-ние
и ускоре-ние
![]() соответственно называются
абсолютной
скоро-стью и
абсолютным ускорением.
соответственно называются
абсолютной
скоро-стью и
абсолютным ускорением.
Д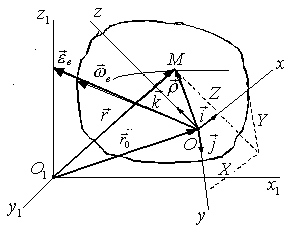 вижение
точки М
по отношению к подвижной системе
координат Охуz
называется относительным
движением и определяется
радиус-вектором
вижение
точки М
по отношению к подвижной системе
координат Охуz
называется относительным
движением и определяется
радиус-вектором
![]() ,
а ее скорость
,
а ее скорость
![]() и ускорение
и ускорение
![]() соответст-венно называются отно-сительной
скоростью и относительным уско-рением.
соответст-венно называются отно-сительной
скоростью и относительным уско-рением.
Движение подвижной системы координат отно-сительно неподвижной
Рис. 3.40 называется переносным. Точки тела А, связанного с подвижной системой отсчета, имеют различные скорости и ускорения, в зависимости от вида движения твердого тела (см. п. 3).
Движение
точки О подвижной системы координат
относительно точки О1 неподвижной
системы определя-ется радиус–вектором
![]() .
Скорость и ускорение точки
тела, с которой в данный момент времени
совпадает движущаяся точка, называются
переносной скоростью
(
.
Скорость и ускорение точки
тела, с которой в данный момент времени
совпадает движущаяся точка, называются
переносной скоростью
(![]() )
и переносным
ускорением (
)
и переносным
ускорением (![]() ).
Например, в случае движения человека
по эскалатору метро переносной ско-ростью
человека будет скорость ступеньки, на
которой он в данный момент находится.
).
Например, в случае движения человека
по эскалатору метро переносной ско-ростью
человека будет скорость ступеньки, на
которой он в данный момент находится.
Положение точки М относительно подвижной систе-мы отсчета (рис. 3.40) определяется радиусом вектором
![]() ,
(3.49)
,
(3.49)
проведенным из начала этой системы О в точке М или тремя координатами x,y,z , которые являются функциями времени t
![]() ,
(3.50)
,
(3.50)
и называются уравнениями относительного движения точки.
Положение точки М по отношению к неподвижной системе отсчета можно определить радиус-вектором
![]() ,
(3.51)
,
(3.51)
Основной задачей при изучении сложного движения точки является установление зависимостей между скоростями и ускорениями абсолютного, относительного и переносного движений.