

-
-
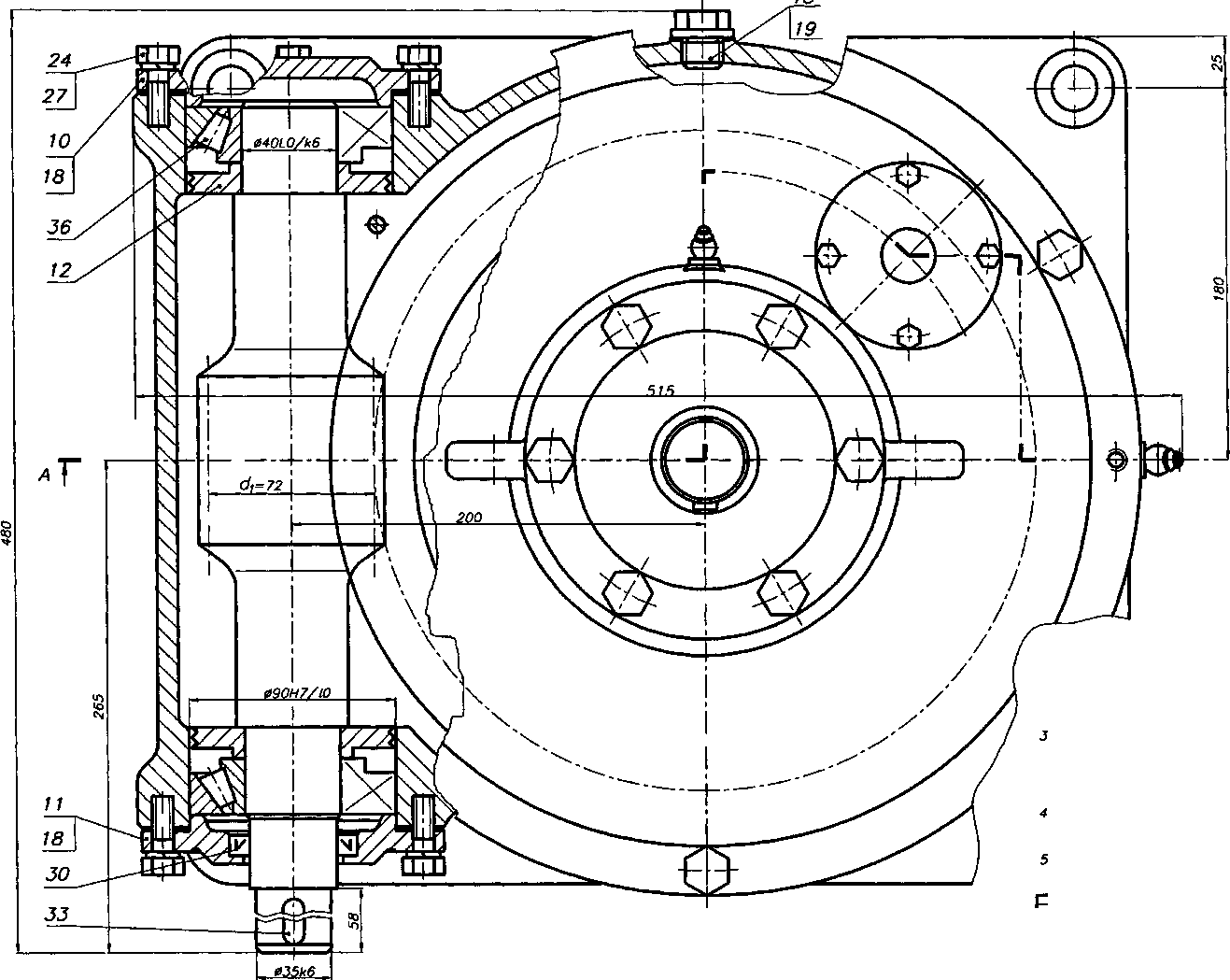
Крышки подшипников выполнены накладными
-
Регулировка подшипников осуществляется изменением толщины прокладок поз 20 и 21
-
Регулировка зацепления осуществляется перестановкой прокладок поз 20 выходного вала
1 Для сохранения теплового баланса корпус и крышка снабжены ребрами 8 Другие виды, разрезы, сечения редуктора, определяющие расположение элементов его оснащения, условно не представлены
Редуктор выполнен с наружным размещением подшипниковых бобышек -
-
Подшипники выходного вала * роликовые конические однорядные уста новлены "в распор"
-
Входной вал установлен на шариковых радиальных однорядных подшип- шипниках Осевая нагрузка воспринимается упорным двойным подшип ником
7 Поверхности соединения "корпус-крошка' перед сборкой пократь уплотнитель — ной пастой типа Герметик
2 После сборки Вала редуктора должна проворачиваться свободно, без стуков и заедания
J Осевой люфт в подшипниках -входного вала-О 07 0 08 мм, —доходного вала-0,09 0 10 мм обеспечить за счет подбора толщина прокладок поз 21 и 20
РЕДУКТОР
червячный
одноступенчатый
-
Регулирование зацепления ваполнить перестановкой прокладок поз 20 до ходного вала
-
Редуктор обкатать по 10 15 мин на всех режимах нагрузки
232
J7
29
34 J
16
 Техническая
характеристика
Техническая
характеристика
Pl= 7,0 kBm J2 Zl- 2
П2= 47,0 мин-' % = 16 22= 64
T2= WOO Нм ч т = 5 мм
/ Обьем масляной ванна-2,2 л 2 Допускаемая радиальная нагрузка консольных участков валов-Входного-5300 Н, выходного-7JOO Н
Рис. 13.7.4а
J Плечо приложения консольной нагрузки -половина длина посадочного места
А-А
040k6
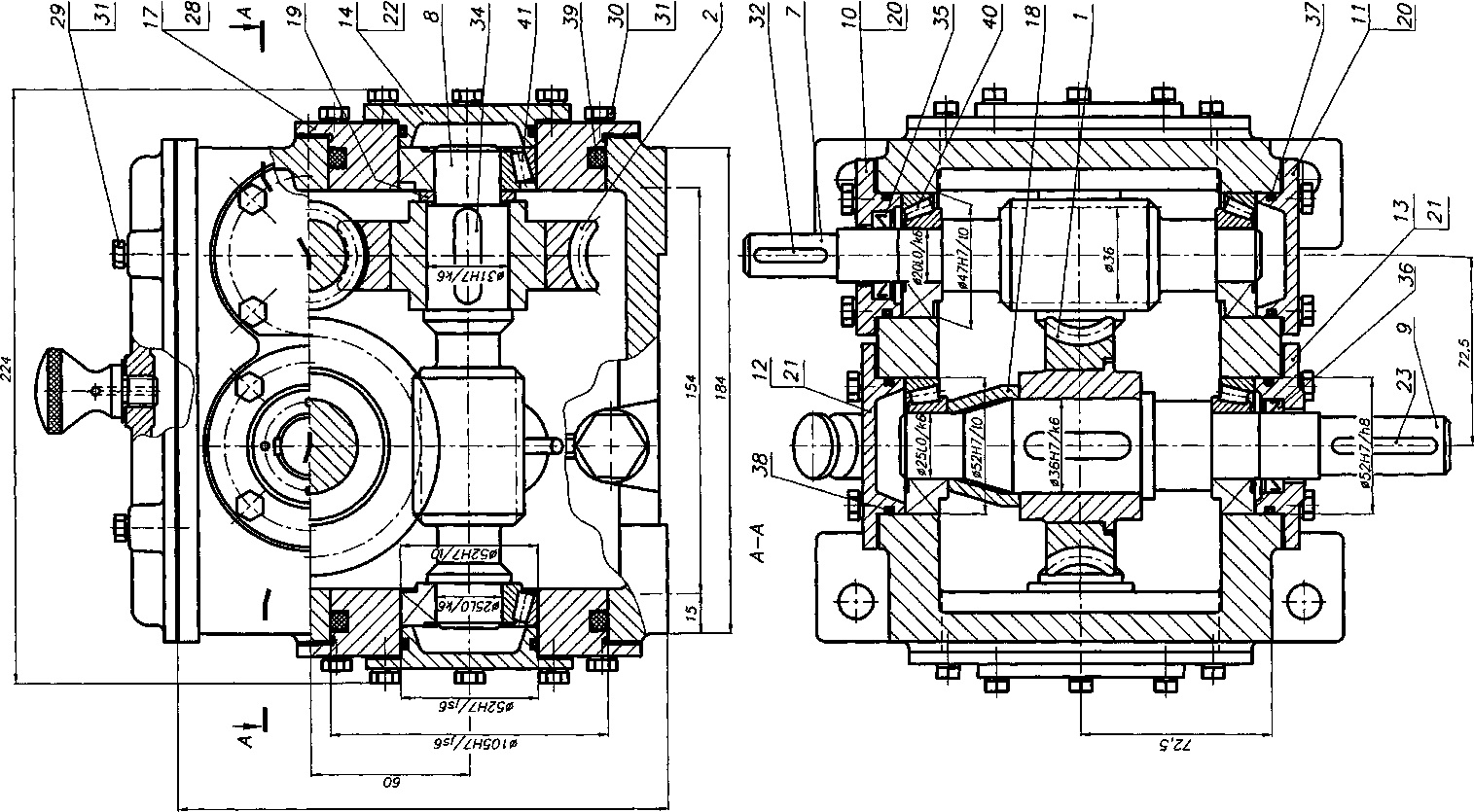
1. Корпус редуктора - неразъемный, выполнен с верхней крышкой поз. 5. 2 Подшипники установлены "в распор" (вал между подшипниками сжат).
-
Крышки подшипников выполнены накладными.
-
Регулировка подшипников осуществляется изменением толщины про кладок поз. 17 и 18.
-
Регулировка зацепления осуществляется перестановкой прокладок поз. 18 выходного вала.
6 Другие виды, разрезы, сечения редуктора, определяющие расположение элементов его оснащения, условно не представлены.
Поберхности
соединения "корпус-крышка'
перед
сборкой покрыть уплотнитель—
ной
пастой типа Герметик
После
сборки бола редуктора должна
проворачиваться
свободно,
без
стукай
и
заедания
Осевой
люфт в подшипниках -входного
вала-0.05
0,06 мм
-выходного
вала-0.05
0,06 мм
обеспечить
за счет подбора толщина прокладок
поз 18 и 17
Регулирование
зацепления ваполнить перестановкой
прокладок
поз 18 выходного
вала
Редуктор обкатать
по 10 15 мин на
всех режимах
нагрузки
КП ДМ МС12а 130704 СБ
РЕДУКТОР
червячной
одноступенчатый
Другие
виды, разрезы, сечения редуктора,
определяющие расположение элементов
его оснащения, условно не представлены
 Рис
13746
Рис
13746
1 1
А/ТУ УПИ"
Kofegpo ДМ и П»
234
13.8. РЕДУКТОРЫ ЧЕРВЯЧНЫЕ ДВУХСТУПЕНЧАТЫЕ
581
 130
130
140
-
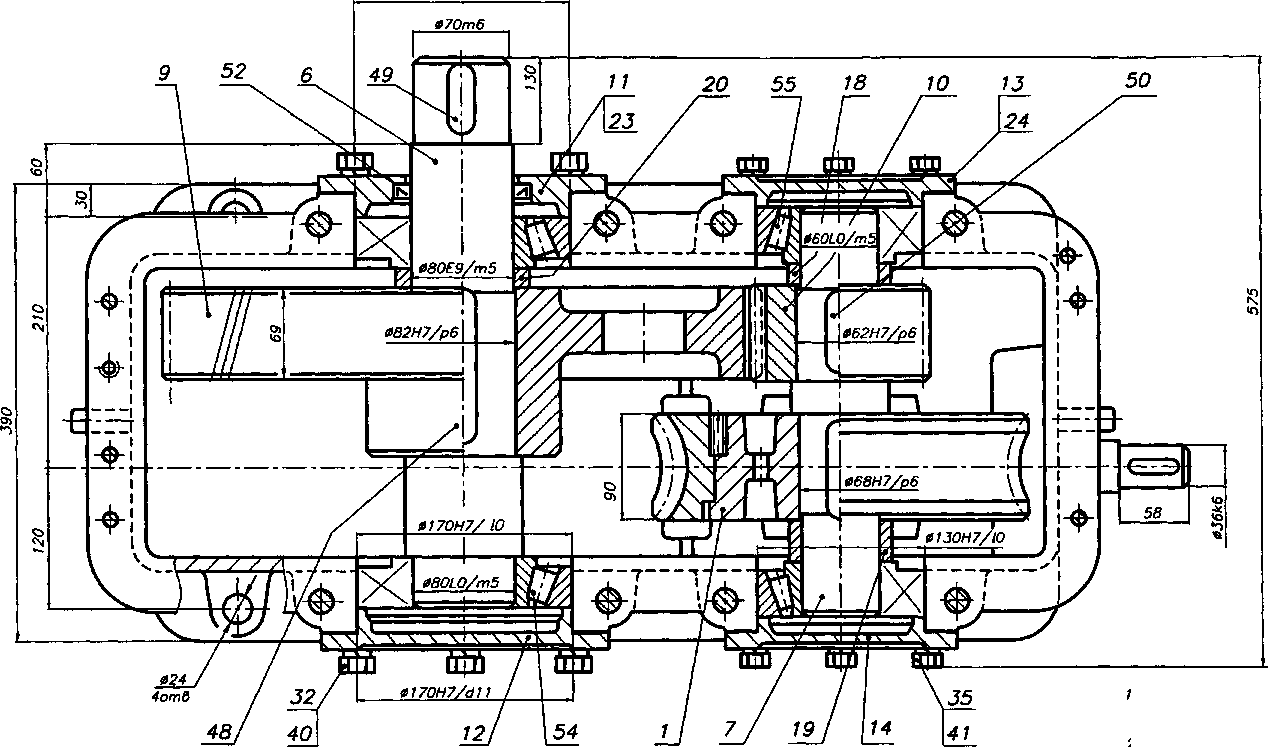
Подшипники установлены "в распор" (вал между подшипниками сжат).
-
Крышки подшипников выполнены накладными.
-
Регулировка подшипников осуществляется изменени ем толщины прокладок поз. 20, 21 и 22.
-
Другие виды, разрезы, сечения редуктора, определяю щие расположение элементов его оснащения, условно не представлены.
Техническая характеристика
Рбх = 0,1 kBm пбх = 2905 мин~' и = 392 пвах= 7,4 мин-1 Тх = 62,43 Н-м
II ступень
I ступень
Z22 =28
т2=3 мм
и ,=28 z,,=1 z ,2 =28
/Т); =3 ММ
Q, = 12
-
Поверхности соединения "корпус-крышка" перед сборкой покрыть уплотнитель — ной пастой типа Герметик
-
После сборки Вала редуктора должна проворачиваться свободно, без стукоб и заедания
-
Осевой люфт б подшипниках, —входного бала—0,04...05 мм, —промежуточного бала-0,05 0,06 мм, —выходного бала-0,06 .0,07 мм обеспечить за счет подбора толщина прокладок поз. 20, 22, 21
-
Регулирование зацепления выполнить перестановкой прокладок поз. 22 про межуточного и поз. 21 выходного вала
5. Редуктор обкатать по 10... 15 мин на всех режимах нагрузки
Рис. 13.8.16
-
Объем масляной ванна—1,2 л
-
Допускаемая радиальная нагрузка консольных участков валов: входного-4400 Н; выходного-5400 Н
-
Плечо приложения консольной нагрузки - половина длина посадочного место
КП ДМ МС12а.13.08.01.СЬ
Пока Hocimat
РЕДУКТОР
1 1
червячный двухступенчатый
НТУ "ХПИ"
Коаедра ММ и ПМ
![]()

pa*
U)
i
'-d
3
о
237
Корпус
редуктора выполнен с наружным
расположе
нием
подшипниковых бобышек
Подшипники
установлены "в распор" (вал
между
подшипниками
сжат)
Крышки
подшипников выполнены накладными
А-А
0170H7/h8
4 Регулиробание
зацепления чербячной
передачи
баполнить перестанобкоО
прокладок
поз 24 промежуточного бала
5 Редуктор
обкатать по 10 15 мин на
бсех
режимах нагрузки
Техническая
характеристика
ицил=
3.81
г,
= 21 22
= 80
мм
т
п= 6 мм
/3 = 15'51'57"
Объем масляной
банна—2,5 л
Допускаемая
радиальная нагрузка
консольнах
участкоб балоб
бходного-4500
Н, баходного-7300 Н
Плечо
приложения консольной нагрузки
-
полобина
длина посадочного место
z,
=
1 г
2
=28
т
=10 q
=
10
БИТУ
Kafegpa
МП
и ПТМ
pj =5,0 kBm пбаж = 15,83 мин ~' =2100 Н м = 106,67
Рис. 13.9.16
-
Регулировка подшипников осуществляется изменени ем толщины прокладок поз. 23, 24 и 25.
-
Другие виды, разрезы, сечения редуктора, определяю щие расположение элементов его оснащения, условно не представлены
Поберхности соединения "корпус-крышка" перед сборкой покрыть уплотнитель— ной пастой типа Герметик После сборки бала редуктора должна проборочибаться свободно, без стукоб и заедания
Осебой люфт б подшипниках -входного бала-0,03 0,04 мм, -промежуточного бала-0,08 0,09 мм, -выходного бала-0,09 0,10 мм обеспечить за счет подбора толщина прокладок поз 25, 24, 23

РЕДУКТОР
J 1
чербячно-иилиндрический
238
13.10. ПЕРЕДАЧИ ПЛАНЕТАРНЫЕ [9,18,30]
13.10.1. НЕКОТОРЫЕ РЕКОМЕНДАЦИИ ПО ВЫБОРУ ПАРАМЕТРОВ, РАСЧЕТУ И КОНСТРУИРОВАНИЮ ПЕРЕДАЧ [9]

 а)
а)
План скоростей
0,5db
Г] =0,92 0,96
План скоростей
План скоростей
7] =0,96 0,98
а-дедуицее збено, Н—бедомое збено, b-непоабижное збено
Рис. 13.10.1. Кинематические схемы некоторых планетарных передач, наиболее широко используемых в машиностроении:
а) схема AI ; б) схема AI-AI ; в) схема AI, а также планы скоростей и некоторые параметры представленных передач
ИСХОДНЫЙ ПАРАМЕТР для конструирования -ВЫПОЛНЯЮТСЯ: передаточное отношение и.
-
Кинематический расчет передачи.
-
Прочностной расчет передачи.
-
Конструирование передачи.
1. КИНЕМАТИЧЕСКИЙ РАСЧЕТ сводится к подбору чисел зубьев колес при соблюдении:
-
уравнения передаточного отношения;
-
уравнения соосности;
-
условия соседства сателлитов при их числе пс ^ 2;
-
условия сборки (зацепляемости) при пс ^ 2. Решение этих уравнений и условий обычно представ ляется в виде так называемых генеральных уравнений, что дает возможность определения областей безуслов ного существования параметров рассматриваемых схем механических передач.
* - В основу структурной символики схем планетарных передач положена символика зацеплений и видов колес: А - внешнее зацеплений (или колесо с внешними зубьями) / - внутреннее зацеплений (или колесо с внутренними
зубьями);
- черта над символом обозначает одновенцовость сателлита
Если на указанные области безусловного существования параметров планетарной передачи нанести линии (или условия) качественных ее показателей (КПД, равнопрочность всех ступеней, минимальный вес и габариты, максимальное быстродействие, требуемая точность и тд.), то такое решение позволит конструктору на уровне выбора схемы определить также качественные показатели будущей передачи.
КИНЕМАТИЧЕСКИЙ РАСЧЕТ для передач с прямыми зубьями выполняется по ниже представленным зависимостям.
1. Выбирают схему рассчитываемой передачи, обес печивающую заданное передаточное отношение (рис. 13.10.1а-в).
2. Предварительное число зубьев передачи: -для схем рис. 13.10.1а,б:
Принимают га=12; 15; 18. Рекомендуемые za -см. табл. 13.10.2. Тогда Zb=za(u-Y) и 2^=0,5(zft-z0); -для схем рис. 13.10.1в: Принимают za = \2; 15; 18 (табл. 13.10.2). Тогда z*=z0(u-l)/e, где e = f(u) (табл. 13 10.1).
Полученные значения гь округляют до целых чисел кратных числу сателлитов пс.
Табл. 13.10.1. Зависимость е = f (и)
|
и |
10 |
12 |
14 |
16 |
|
е |
1,4 |
1,5 |
1,6 |
1,8 |
-
Уточняют коэффициент е = za (и -1) 1гь.
-
Предварительно определяют z/= (гъ - z0) / (е+1); и Zg=ezf. zf, zg - целые числа.
-
По табл. 13.10.2 выбирают коэффициенты смеще ния ха - для колеса а и хь - для колеса Ь.
Xa,Xb=f(Za,Zg).
6. Вычисляют коэффициент
В = 1000 (ха+хь) I (za+zg)
и по номограмме (рис. 13.10.2) определяют угол зацепления ofw коррегированной передачи. Принимая в первом приближении модули обеих ступеней одинаковыми, производят уточнение чисел зубьев по условиям соосности, соседства и сборки.
УРАВНЕНИЕ СООСНОСТИ (для схем рис.13.10.1а,б)
239
|
|
za=\2 |
za=\5 |
20=18 |
г0 = 22 |
г0 = 28 |
20-34 |
|
zg |
+ха +xb |
+ха +xb |
+ха +xb |
+ха +xb |
+ха +хь |
+ха +хь |
|
18 |
0,30 0,61 |
0,34 0,64 |
0,54 0,54 |
_ |
_ |
_ |
|
22 28 34 42 50 |
0,30 0,66 0,30 0,88 0,30 1,03 0,30 1,30 0,30 1,43 |
0,39 0.75 0,26 1,04 0,13 1,42 0,20 1,53 0,25 1,65 |
0,60 0,64 0,40 1,02 0,30 1,30 0,29 1,48 0,32 1,63 |
0,68 0,68 0,59 0,94 0,48 1,20 0,40 1,48 0,43 1,60 |
0,86 0,86 0,80 1,08 0,72 1,33 0,64 1,60 |
1,01 1,01 0,90 1,30 0,80 1,58 |
|
65 |
0,30 1,69 |
0,26 1,87 |
0,41 1,89 |
0,53 1,80 |
0,70 1,84 |
0,83 1,79 |
|
80 |
0,30 1,96 |
0,30 2,14 |
0,48 2,08 |
0,61 1,99 |
0,75 2,04 |
0,89 1,97 |
|
100 |
0,30 2,90 |
0,36 2,32 |
0,52 2,31 |
0,65 2,19 |
0,80 2,26 |
0,94 2,22 |
|
125 |
|
|
|
0,75 2,43 |
0,83 2,47 |
1,00 2,46 |
= (Zb-Zf)
УСЛОВИЕ СБОРКИ (зацепляемости) передачи Zblnc=7; zalnc=7, где 7 - целое число.
|
73,0 -зе |
26.0^ |
39,0 ~ц |
52.0 -^ |
||||
|
|
\2S20 |
|
|
= |
^28' |
|
|
|
12,0 4 |
\-23-W |
25,0 4 |
\-25-50' |
38,0 4 |
|
51,0 4 |
12д.40. |
|
11,0 -\ |
\2У |
24.0 4 |
4-25-40' |
370 4 |
42750' |
50,0 4 |
|
|
- |
\ 22-50' |
|
\2УЗО' |
|
42740' |
|
\ 29-30' |
|
10,0 -= |
Jr22'40' |
23.0 4 |
|
36,0 \ |
|
49.0 4 |
|
|
- 9.0 i |
\-22-JO' |
22,0 -Ё |
\25'20' |
35.0 4 |
\2730' |
48,0 4 |
\29'20' |
|
|
\2?20' |
|
425'Ю' |
|
^•2720' |
•Е |
|
|
8,0 4 |
\-22-W |
21.0 \ |
125. |
34,0 4 |
|
47,0 -Ё |
Ё-29'70' |
|
7,0 4 |
\22' \2Г50' |
~ 20,0 \ |
\24'50' |
зз.о 4 |
\27W~ |
46,0 -Ё |
\29' |
|
6,0 4 |
|
19,0 4 |
\ 24'40' |
32,0 4 |
\2Т |
45,0 4 |
|
|
|
\2Г40' |
|
i- |
i |
4 |
|
428-50' |
|
5,0 4 |
\2ГЗО' |
18,0 4 |
124-30' |
зю 4 |
426-50' |
44,0 4 |
|
|
4,0 4 |
\2V20' 1-2П01 |
17,0 \ |
--24-20' |
зо.о 4 |
\26'40' |
43,0 4 |
428-40' |
|
= |
| |
|
\24'Ю' |
|
^ |
|
|
|
з.о 4 |
г21 |
16,0 4 |
|
29,0 4 |
\-26'30' |
42,0 4 |
428-30' |
|
|
f 20-50' |
|
г24' |
|
|
: |
L |
|
2.0 i |
\20'40' |
15,0 4 |
}г 2S50' |
27.0 \ |
426-20' |
47,0 4 |
428-20' |
|
£ |
~t 20-30' |
|
=- |
|
|
|
|
|
1,0 4 |
~f 20-20' |
74,0-= |
\2S40' |
27.0 \ |
\-26-W |
40,0 4 |
~г28'10' |
|
|
\2Q-\0' |
|
=г 23-30' |
|
- |
|
|
|
0 ^20- |
73,0 -Ё& |
26,0 -3^6- |
39.0 -^ |
||||
Рис. 13.10.2. Номограмма для определения угла
зацепления коррегированной передачи
Табл. 13.10.2. Значения коэффициентов смещения ха и
УСЛОВИЕ СОСЕДСТВА будет проверено ниже (см. прочностной расчет передачи п. 7).
2. ПРОЧНОСТНОЙ РАСЧЕТ включает:
2 1. Выбор материалов зубчатых колес и вида их химико-термической обработки (4.1).
2.2. Определение допускаемых напряжений сг^ (41). Эквивалентное число циклов нагружения (4.1 п. 2.2):
- шестерни a nhea = 6QnaL],c kHE,
где лi=nо-лй-относительная частота вращения шестерни а и водила Ь;
- сателлита NHEg = 6QngLhc kHE,
где ng=naza/Zg - относительная частота вращения
сателлита g и шестерни а. Определение допускаемых напряжений О"нра) для пары "центральная шестерня а - сателлит g" проводится, следуя (4.1 п. 2).
2.3. Прочностной расчет закрытых зубчатых передач от носительно aw (4.2.2).
1. Из двух пар зацепления передачи "b-g" (зацепле ние внутреннее) и "a -g" (зацепление внешнее) оп ределение межосевого расстояния Ow проводят по зависимости для внешего зацепления, как более на груженного.
зГГТ F~7> ?
i . / i ,\-\1 *0 КНв ал !•* л{\
о;=Ыы'+1) V^g/.ц'дс'
где u'=na/ng;
П -коэффициент неравномерности распределения нагрузки по потокам.
При отсутствии компенсирующих устройств в передаче (рис. 13.10.3) П = 1,3...2,0. В передачах с самоустанавливающимся одним из центральных колес (рис. 13.10.4) Я=1,1...1,2.
i/ba=b/ow=0,5 для и ^6,3; if/ba= 0,4 для и > 6,3.
2. Величину a'w округляют до ближайшего значения Ои^мм (о^ио^) в соответствии с ГОСТ (табл. 4.2.3)
3. Ширина колеса внутреннего зацепления bb=if/ba ow Ширина венца сателлитов bg= (1,03...1,04) Ьь. Ширина колеса внешнего зацепления
Ь„=(1,03.. 1,04)Ь,.
4. Модуль передачи m = 2 ow/[ (и'+1) za].
m' округляют до ближайшей величины тп, мм (т„к т') в соответствии с ГОСТ (табл. 4.2.2).
-
Уточняют числа зубьев колес za, zb и zg с провер кой условий соосности и сборки.
-
Определяют диаметры колес а, Ъ и g и уточняют коэффициенты смещения для получения aw.
7. УСЛОВИЕ СОСЕДСТВА
aw sin (tt/dc) > 0,5 dag, где dag - диаметр вершин зубьев сателлита.
-
Определяют предварительные размеры валов (1 2 п 11).
-
Выпоняют компоновку редуктора (п. 5), принимая типы подшипников:
-
для опор центральных валов - шариковые радиаль ные легкой серии;
-
для опор сателлитов - шариковые или роликовые сферические средней серии.
10. Выпоняют проектный расчет валов. Учитывая наибольшую возможную неравномерность распределения нагрузки по потокам, окружную силу в зацеплении колес вычисляют по зависимости
Ft = 4Ta/(dakc).
11. Проводят выбор подшипников.
3. КОНСТРУИРОВАНИЕ ПЕРЕДАЧИ
Тенденции развития планетарных редукторов прослеживаются при сравнении конструкций редукторов рис. 13.10.3 и 13.10.4.
На рис. 13.10.3 представлен планетарный одноступенчатый редуктор с жестко установленными колесами а и Ь, что приводит к повышенным величинам О.
Для уменьшения неравномерности распределения нагрузки по потокам одно из центральных колес выполняют самоустанавливающимся На рис 13.10.4 самоустанавливающимся выполнено колесо а . Возможно выполнение самоустанавливающимся колеса Ь.
Для уменьшения неравномерности распределения нагрузки по ширине венца сателита его устанавливают на сферическом шариковом или роликовом подшипнике.
Водила выполняют цельными (литыми из стали или высокопрочного чугуна), сварными или составными.
Другие рекомендации по конструированию [9].
240