

Вопрос № 20 Принцип копирования на токарных станках. Описать работу электрокопировальной системы токарного станка.
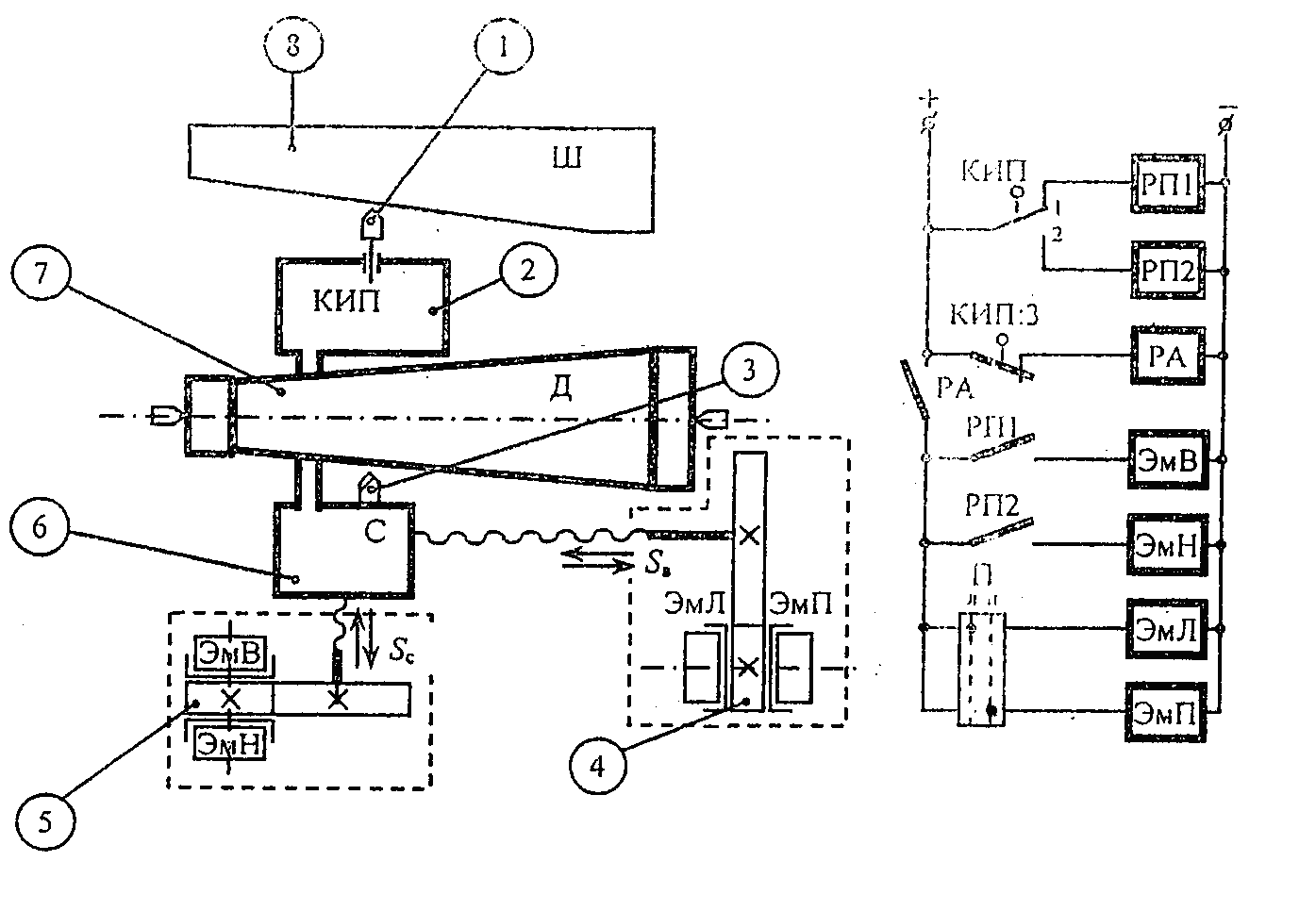
Рисунок 10- Электрокопировальная система токарного станка
Принцип копирования применяется для обработки тел вращения сложной формы (конусной, ступенчатой или криволинейной). Требуемый профиль воспроизводится по шаблону. Копирование поверхности производится автоматически копировальным пальцем, который имеет форму резца. Характер перемещения передается в систему управления, которая вырабатывает сигнал на перемещение суппорта с резцом. Траектория движения резца повторяет траекторию движения копировального пальца. В конце обработки заготовки получается готовая копия шаблона.
По сравнению с универсальными станками, копировальные обладают большей производительностью, а полученное изделие – большей схожестью.
По принципу действия выделяют три основных вида копировальных станков:
- с непосредственным механическим управлением,
- с гидравлическим следящим управлением,
- с электрическим следящим управлением.
Широкое применение получили копировальные станки с электрическим следящим управлением. Принцип их действия состоит в следующем.
Копировальный палец (1) перемещается по профилю шаблона (8). Он может двигаться к шаблону или от шаблона. Перемещение воспринимается копировально-измерительным прибором (2), вследствие чего, замыкается механический контакт (КИП:1) при перемещении к шаблону или контакт (КИП:2) – от шаблона. Контакт в цепи реле аварийного РА (КИП:3) постоянно замкнут и размыкается только при чрезвычайном нажатии на копировальный палец.
Копировально-измерительный прибор (КИП) имеет жесткую связь с суппортом (6), кторорый вместе с резцом (3) управляется ведущей передачей (4) и следящей передачей (5).
Ведущая передача обеспечивает ведущую подачу в двух направлениях (± SB) с помощью электромагнитов ЭмП или ЭмЛ, выбор которых производится переключателем «П» (Л-левое, П-правое).
Следящая передача обеспечивает следящую подачу в двух направления (± SC) с помощью магнитов ЭмВ и ЭмН, включение которых производится при срабатывании реле РП1 или РП2.
В зависимости от подачи (SB и SC) резец (3) обрабатывает вращающуюся заготовку (7) в соответствии с формой шаблона.
Вопрос № 21 Описать электрооборудование и работу схемы управления токарно-револьверного станка модели 1п365: исходное состояние; включение в работу.
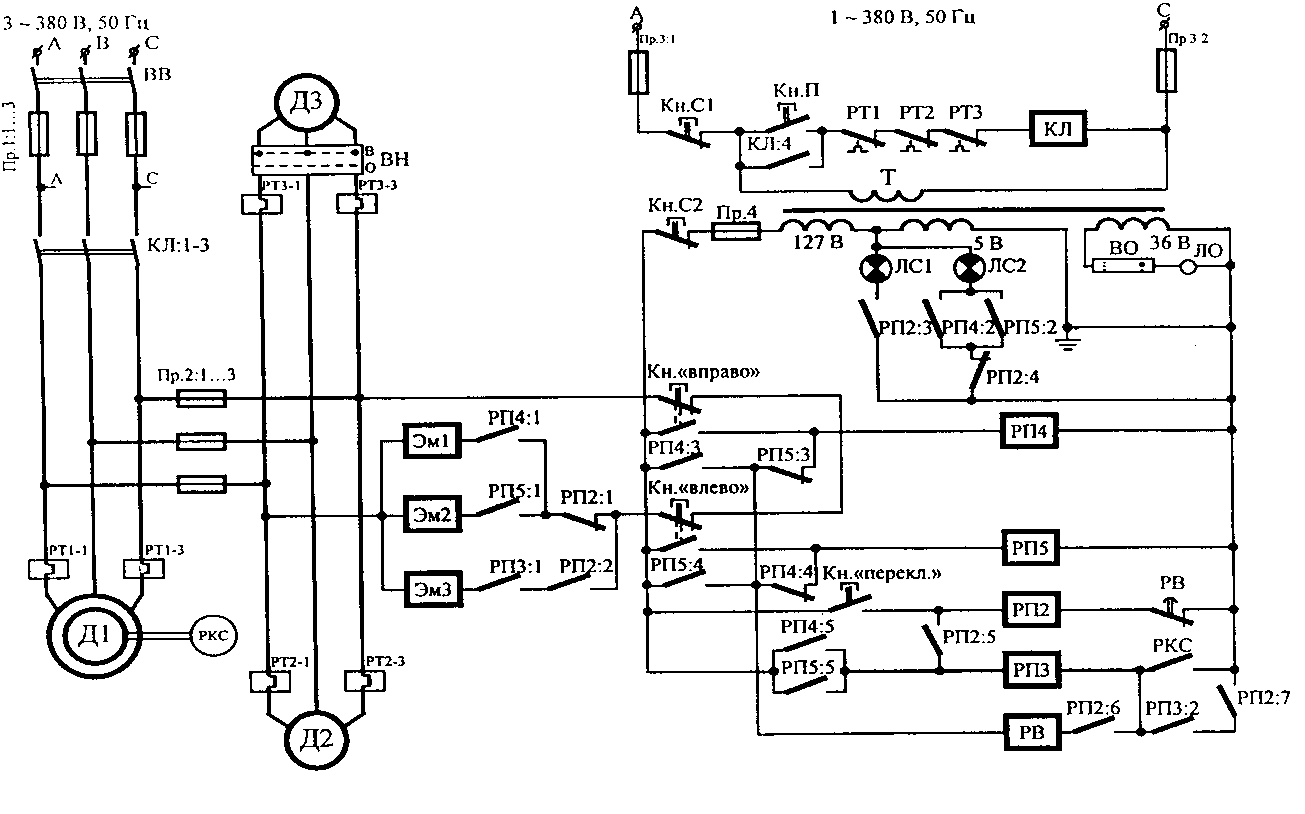
Рисунок 11- Принципиальная электрическая схема токарно-револьверного станка модели 1П365
21.1 – Исходное состояние
Схема питается ~ 3фазным 380 В, 50 Гц
Поданы все виды питания: включен ВВ( вводный выключатель SA ), в результате замыкаются его 3 контакта и получают питание: цепи управления, местного сигнализации, освещения от трансформатора
-------------------------------------------------------------------------------------------------------------
Алгоритм: ВВ(SA): 1ф(А) – ВВ – Пр.1:1(FU1:1) - .А – КЛ:1
.А – Пр.3:1 – Кн.С1 (SВ) - . –Кн.П . – КЛ:4. – Т - . – Пр.3:2 - .С – Пр.1:3 –ВВ –3ф(С)
2ф(В) – ВВ – Пр.1:2 – КЛ:2
3ф(С) – ВВ- Пр.1:3 - .С – КЛ:3
Т~ 127В – Пр.4 –Кн.С 2 - . – Кн. «вправо»
. – РП4:3
. – Кн. «влево»
. – РП5:4
. – Кн. «перекл.»
. – РП4:5
. – РП5:5
Т ~ 36В – ВО (вкл. ) – ЛО (лампа местного освещения) - . – Т ЛО горит
Станок готов к работе
-----------------------------------------------------------------------------------------------
21.2 – Включение в работу
Нажимаем на кнопку «пуск» Кн.П (SB), замыкается ее контакт , в результате:
Алгоритм:
.1ф(А) – Кн.П - . – РТ1(реле тепловое) – РТ2 – РТ3 – КЛ( катушка контактора линейно-ного) - . – Пр.3:2 - .С – Пр1:3 –ВВ- 3ф(С)
В результате запитали КЛ(контактор линейный) изменилось положение его контактов: (они замкнулись) , в результате :
-------------------------------------------------------------------------------------------------------------
Алгоритм:
1ф(А) – КЛ:1 - . – РТ1-1 – Д1 (М1)
. – Пр.2:3 - . – РТ3-1 - ВН ( вкл. насоса охлаждения)
. – Эм1 – РП4:1
. – Эм2 – РП5:1
. - Эм3 – РП3:1
. - РТ2-1 – Д2(М2)
2ф(В) - КЛ:2 – . - Д1(М1)
. – Пр.2:2 - . – ВН
. - Д2(М2)
3ф(С) – КЛ:3 - . – РТ1-3 – Д1(М1)
. – Пр.2:1 - . – РТ3-3 – ВН
. - Кн. «вправо» - Кн. «влево» - . - РП2:1 - . – РП4:1 . - РП5:1 . – РП2:2. – РТ2-3 – Д2(М2)
В результате: 1,2,3ф на Д1(АД шпинделя) - запускается
1,2,3ф на Д2(АД гидросистемы) – запускается
1ф на Эм1, Эм2, Эм3 – подготовятся их цепи питания
Замкнулся КЛ:4 – собирается цепь самопитания КЛ
Если ВН – «В» - пустится Д3(М3) (насос охлаждения)
Нажимаем кратковременно Кн. «вправо», в результате замкнется ее контакт, в результате:
----------------------------------------------------
. 127В – Кн. «вправо» -. – РП 4 - . – 127В Т
---------------------------------------------------
В результате запитали РП4, в результате изменилось положение ее контактов:
- РП4:1 – запитали Эм1 – подключится фрикцион вращения шпинделя «вправо»
- РП4:2 - загорелась ЛС2 «работа»
- РП4:3 – на самопитание РП4
- РП4:4 – размыкается (блокируется) цепь РП5
- РП4:5 – запитали РП3, в результате:
- РП3:1 готовит цепь Эм3(гидротормоза)
- РП3:2 готовит цепь РВ(реле времени)
В результате: шпиндель вращается «вправо» с обрабатываемой деталью, подача суппорта от гидросистемы