

2.1 Проекція сили на вісь і на площину. Аналітичний спосіб задавання сили
 Аналітичний
метод розв'язання задач статики
побудований на понятті про проекцію
сили на вісь.
Аналітичний
метод розв'язання задач статики
побудований на понятті про проекцію
сили на вісь.
Проекція сили (як і будь-якого іншого вектора) на вісь • алгебраїчна величина, що дорівнює добутку модуля сили на косинус кута між. силою і додатним напрямком осі.
Якщо цей кут гострий - проекція додатна, якщо тупий - від'ємна, а якщо сила перпендикулярна осі - її проекція дорівнює нулю.
Рис. 2.1
![]()
 Проекцією
сили
Проекцією
сили
![]() на площину Оху називається вектор
на площину Оху називається вектор
![]() ,
що
знаходиться між проекціями початку і
кінця сили
,
що
знаходиться між проекціями початку і
кінця сили
![]() на цю площину (рис.
2.2).
на цю площину (рис.
2.2).
Таким
чином, на відміну від проекції сили
на вісь, проекція сили на площину -
величина векторна, оскільки вона
характеризується не тільки своїм
числовим значенням, але й направленням
в площині Оху
. За
модулем
![]() ,
де
,
де
![]() - кут між напрямком сили
- кут між напрямком сили
![]() і її проекції Fxy.
і її проекції Fxy.
Рис. 2.2
![]() (2.2)
(2.2)
Аналітичний спосіб задавання сили
 Для
аналітичного задавання сили необхідно
вибрати систему координатних осей
Oxyz,
за
відношенням
до якої буде визначатись напрям сили у
просторі. В механіці користуються
правою системою координат, тобто
такою системою, в якій найкоротше
суміщення осі Ох
з
віссю Оу
проходить,
якщо дивитись з додатного кінця осі Oz,
проти
ходу стрілки годинника (рис. 2.3).
Для
аналітичного задавання сили необхідно
вибрати систему координатних осей
Oxyz,
за
відношенням
до якої буде визначатись напрям сили у
просторі. В механіці користуються
правою системою координат, тобто
такою системою, в якій найкоротше
суміщення осі Ох
з
віссю Оу
проходить,
якщо дивитись з додатного кінця осі Oz,
проти
ходу стрілки годинника (рис. 2.3).
Вектор,
який зображає силу
![]() ,
можна побудувати, якщо відомі модуль F
цієї
сили і кути α, β, γ, які сила складає з
координатними осями. Таким чином,
величини
,
можна побудувати, якщо відомі модуль F
цієї
сили і кути α, β, γ, які сила складає з
координатними осями. Таким чином,
величини
![]() задають силу
задають силу
![]() .
Точка А прикладення сили повинна
бути задана окремо її координатами
x,y,z.
.
Точка А прикладення сили повинна
бути задана окремо її координатами
x,y,z.
Рис. 2.3
Знаючи ці проекції, можна визначити модуль сили і кути, які вона складає з координатними осями, за формулами:
 (2.3)
(2.3)
Якщо сила розміщена в одній площині, то її можна задати проекціями на дві осі Ох і Оу . Тоді формули, що визначають силу за її проекціями, приймуть вигляд
 (2.4)
(2.4)
2.2 Зведення збіжних сил до рівнодійної
Система прикладених до твердого тіла сил називається збіжною, якщо лінії дії усіх сил перетинаються в одній точці. Точка перетину сил називається центром сил.
Нехай
задана довільна система збіжних сил
(![]() ),
прикладена до твердого тіла. Перенесемо
ці сили як ковзні вектори в точку перетину
їх ліній дій - точку А
(рис.
1.6). Користуючись аксіомою паралелограма
сил, знайдемо рівнодійну цих сил. З
рівняння (1.7) рівнодійна
),
прикладена до твердого тіла. Перенесемо
ці сили як ковзні вектори в точку перетину
їх ліній дій - точку А
(рис.
1.6). Користуючись аксіомою паралелограма
сил, знайдемо рівнодійну цих сил. З
рівняння (1.7) рівнодійна
![]() системи
збіжних сил дорівнює векторній сумі
цих сил:
системи
збіжних сил дорівнює векторній сумі
цих сил:
 (2.5)
(2.5)
Графічно
рівнодійна сила
![]() визначається як сторона, що замикає
силовий многокутник (рис. 1.7).
визначається як сторона, що замикає
силовий многокутник (рис. 1.7).
Визначимо
аналітично рівнодійну
![]() .
Для цього введемо прямокутну систему
координат Oxyz
з
початком
в точці О
перетину
лінії дії заданих сил (
.
Для цього введемо прямокутну систему
координат Oxyz
з
початком
в точці О
перетину
лінії дії заданих сил (![]() )
(рис. 2.4).
)
(рис. 2.4).
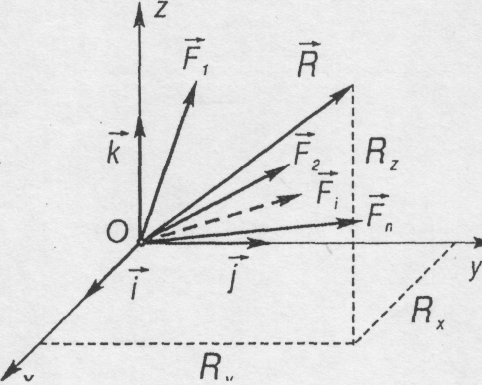 На
основі виразу (1.7) та користуючись
теоремою (її доведення наведено в курсі
векторної алгебри), згідно якої проекція
векторної суми на вісь дорівнює
алгебраїчній сумі проекцій на ту ж
саму вісь складових векторів, одержимо
вирази для проекцій Rx
,
Ry
, Rz
рівнодійної
На
основі виразу (1.7) та користуючись
теоремою (її доведення наведено в курсі
векторної алгебри), згідно якої проекція
векторної суми на вісь дорівнює
алгебраїчній сумі проекцій на ту ж
саму вісь складових векторів, одержимо
вирази для проекцій Rx
,
Ry
, Rz
рівнодійної
![]() у
вигляді
у
вигляді

(2.6)
де
Fix
, Fiy
, Fiz
- проекції
сили
![]() на
осі координат.
на
осі координат.
Рис. 2.4
![]() (2.7)
(2.7)
або
 ,
,
а
напрям
рівнодійної - наступними
напрямними
косинусами (косинуси
кутів між напрямом вектора
![]() і
додатними напрямами відповідних осей
координат):
і
додатними напрямами відповідних осей
координат):
 (2.8)
(2.8)
Формули (2.6)-(2.8) дають повне аналітичне визначення рівнодійної системи збіжних сил.