

4.4 Математическая модель эксперимента. Метод наименьших квадратов
После того как проведены первичная статистическая обработка результатов эксперимента и обоснование точности полученных экспериментальных данных необходимо найти аналитическую зависимость выходного параметра y от входных параметров (факторов) x1, x2, …, xk.
Рассмотрим простейший случай. Пусть выходной параметр y зависит только от одного фактора x. В результате проведения эксперимента получим данные, представленные в таблице 3.
Таблица 3 – Результаты эксперимента
Параметры |
Значения |
|||
x |
x1 |
x2 |
… |
xm |
y |
у1 |
y2 |
… |
ym |
Возникает задача найти функцию y = f(x), отражающую в основном характер экспериментальной зависимости, - это задача сглаживания экспериментальной зависимости. Так как y и x случайные величины, то кривая, проходящая через точки Мi (рисунок 10), не отражает основного характера зависимости y = f(x). Кривой, отражающей в основном характер экспериментальной зависимости у = f(х), будет кривая Г.
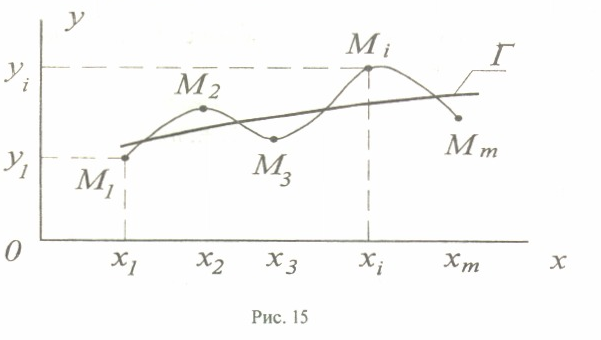
Рисунок 10 – Сглаживание экспериментальной зависимости
Решают две вспомогательные задачи.
1 Определение вида сглаживающей функции.
2 Определение значений параметров, входящих в сглаживающую функцию [17].
Первая задача решается исходя из дополнительной информации об эксперименте, вторая - математическими методами. Зачастую сглаживающая функция представляется в виде линейной комбинации неизвестных числовых параметров и некоторых известных линейно независимых функций
![]() (4.14)
(4.14)
Такими функциями, например, могут быть
![]() (4.15)
(4.15)
Для удобства дальнейших вычислений вводят в эту матрицу еще одну переменную, она называется «фиктивной» и во всех опытах равна x0u = +1. В результате получена матрица размерностью N*(K+1). Вектор наблюдений образует другую матрицу, размерностью N*1.
 . (4.16)
. (4.16)
Рассмотрим на примере однофакторной модели идею метода наименьших квадратов, который дает наилучшие линейные оценки.
Для однофакторной модели (линейной) матрица содержит лишь два столбца. Необходимо подобрать такие значения b0 и b1 (или так провести прямую на графике (рисунок 11) в координатах X1 и Y), чтобы модель наилучшим образом удовлетворяла данным. Провести прямую через все точки с координатами (X1u и Yu) практически невозможно. Это объясняется тем, что:
а) измерения Yu точны, но гипотеза о линейном влиянии X1 на Y не соответствует истине;
б) влияние X1 на Y действительно линейно, но Yu измерено со значительной среднеквадратической ошибкой Sэ;
Рисунок 11 – Графическое изображение однофакторной модели
y=b0x0 + b1x1
в) одновременно несовершенна гипотеза линейности и существует ошибка измерения Sэ.
Следовательно, всегда между наблюдаемыми значениями (Yu) и расчетными значениями (Ŷu) возможна разница (∆u):
∆u =Yu - Ŷu (4.17)
Необходимо
свести общую разницу к минимуму. При
этом наименее громоздкие вычисления
получаются, если минимизировать не
сумму абсолютных отклонений по всем
опытам,
![]() ,
а сумму квадратов отклонений:
,
а сумму квадратов отклонений:
![]() (4.18)
(4.18)
При подстановке значений Ŷu из модели для каждого опыта получим:
![]() (4.19)
(4.19)
Для нахождения минимума функции необходимо приравнять к нулю частные производные по всем неизвестным, т.е. по b0 и b1. Получаем систему нормальных уравнений, при решении которых и будут вычислены неизвестные коэффициенты модели:
![]() (4.20)
(4.20)
сокращая оба уравнения на «-2» и производя почленное суммирование, получим:
![]() (4.21)
(4.21)
Далее вводим обозначения:
N(u)=(00) ΣX1u=(01) ΣY=(0Y)
ΣX1u=(10) ΣX1u2=(11) ΣYX1u=(1Y)
Тогда система уравнений примет вид:
![]() (4.22)
(4.22)
Неизвестные оценки коэффициентов модели образуют вектор b:
![]()
 (4.23)
(4.23)
Известные априори суммы (00), (i0), (ij) и (ii), определенные только уровнями факторов Xi в информационной таблице, образуют квадратичную матрицу М размером (k+1)*(k+1):
М=![]()
 (4.24)
(4.24)
Эта матрица называется матрицей моментов плана, ее можно получить из матрицы плана X1, если последнюю умножить слева на транспонированную матрицу XТ: М= XТ* X.
С
целью исследования свойств и обобщения
результатов для матриц различных планов
X
матрицу М
целесообразно нормировать по числу
опытов, получая информационную матрицу
MN=![]() .
.
Известные апостериори суммы (0Y) и (iY), включающие результаты эксперимента, образуют вектор YM, являющийся произведением XТ на вектор наблюдений Y:
![]()
 YM=XТY (4.25)
YM=XТY (4.25)
Следовательно, в матричной форме система нормальных уравнений записывается:
Мb= УМ (4.26)
А с учетом матрицы Х: ХТХВ= ХТУ из нее определяется вектор оценок коэффициентов:
b
= М-1УМ
= (![]() )-1ХТУ
= N-1MN-1XTY
= ДХТY
= LY (4.27)
)-1ХТУ
= N-1MN-1XTY
= ДХТY
= LY (4.27)
В данном случае выделены две новые независимые от результатов эксперимента матрицы: так называемая D-матрица, или ковариационная, элементы которой оценивают статистические характеристики модели, и так называемая L-матрица, элементы которой позволяют рассчитывать оценки bi без обращения матриц по простым формулам с помощью микрокалькуляторов.
Д = М-1 = (ХТХ)-1 (4.28)
L = DХТ = (ХТХ)-1ХТ (4.29)
Неизвестные оценки в системе нормальных уравнений можно рассчитать через определитель det M = A матрицы моментов и определителя det Mi = Ai матриц Mi, образуемых путем замены i-го столбца на вектор-столбец УМ:
bi = det Mi/ det M = Ai/A (4.30)
Таким образом, для однофакторной модели при использовании правила Крамера используются простые формулы:
![]()
![]()
![]()
![]() (4.31)
(4.31)
![]()
Ковариационная матрица D = ХТХ-1 определяется только матрицей независимых переменных Х, т.е. планом эксперимента, поэтому априорный анализ ее свойств лежит в основе синтеза этих планов [7]. Точность оценивания параметров модели зависит от матрицы М или другими словами от выбора точек Хij . Это даёт возможность ставить задачу об оптимальном выборе точек, то есть планировании экспериамента. Набор координат этих точек называют планом эксперимента.
Рассмотрим пример. Найти функцию, отражающую экспериментальную зависимость у от x, используя данные таблицы 4.
Таблица 4 – Результаты эксперимента
Параметры |
Значения параметров |
|||||||||
x |
1,20 |
1,31 |
1,40 |
1,61 |
1,74 |
1,80 |
2,00 |
2,14 |
2,19 |
2,41 |
y |
0,54 |
0,59 |
0,67 |
0,76 |
0,85 |
0,97 |
1,07 |
1,18 |
1,27 |
1,30 |
Функцию у = f(х) возьмем в виде
y = C1x2 + C2x + C3.
Неизвестные С1, С2, С3 определим из условий (4.15).
Здесь φ1(х) = x2, φ2(х) = х, φ3(х) = 1.
В результате получим систему
128,94С1 + 64,30С2 + 33,17С3 = 34,63;
64,30 С1 + 33,17 С2 + 17,80С3 = 17,60;
33,17 С1 + 17,80 С2 + 10,00С3 = 9,29.
Решив эту систему, найдем С1 = 0,168; С2 = 0,102; С3 = 0,189.
Следовательно, функциональная зависимость у от х имеет вид
у = 0,168х2 + 0,102х + 0,189.