

Тема 4. Уравновешивание механизмов.
Задачи уравновешивания. Уравновешивание вращающихся масс. Статическая и динамическая уравновешенность. Балансировка статическая и динамическая. Уравновешивание машин на фундаменте.
4.1. Задачи уравновешивания
При движении механизма различные точки его звеньев движутся с ускорениями, в результате чего возникают силы инерции, которые вызывают дополнительные нагрузки в кинематических парах. Эти нагрузки, которые могут в десятки раз превосходить статические, изменяясь по величине и по направлению, передаются раме и фундаменту и вызывают их вибрацию, колебания и расшатывание. Кроме того, они деформируют валы и дополнительно нагружают подшипники, ускоряя их износ. Особенно велики силы инерции и вызываемые ими нагрузки в современных быстроходных машинах. Отсюда возникает задача о проектировании машин таким образом, чтобы избежать (полностью или частично) указанные нагрузки.
Различают две задачи:
- уравновешивание вращающихся звеньев (роторов);
- уравновешивание машин на фундаменте.
4.2. Уравновешивание вращающихся звеньев
В
теории уравновешивания
любое вращательное звено называют
ротором. Различают три вида уравновешенности
роторов: статическую,
динамическую
и полную.
Статическим
называется такое уравновешивание, в
результате которого центр масс оказывается
лежащим на оси вращения и, следовательно,
главный вектор
![]() .
При этом главный момент
.
При этом главный момент
![]() .
Если вследствие уравновешивания ротора,
главный момент равен нулю, а главный
вектор не равен нулю, то такое
уравновешивание называется динамическим.
Полное
уравновешивание достигается, когда
и
.
Если вследствие уравновешивания ротора,
главный момент равен нулю, а главный
вектор не равен нулю, то такое
уравновешивание называется динамическим.
Полное
уравновешивание достигается, когда
и
![]() .
.
4.3. Балансировка роторов
Правильно спроектированные с точки зрения уравновешенности звенья все же вследствие неоднородности материала, точности изготовления, дефектов сборки могут оказаться на практике несколько неуравновешенными. Дисбаланс таких звеньев должен быть обнаружен и устранен.
Процесс устранения неуравновешенности звеньев называется балансировкой. Балансировка бывает статической и динамической.
Статическая балансировка применяется для деталей, имеющих небольшие относительно размеры вдоль оси вращения. Осуществляется она чаще всего на балансировочных параллелях 1 (рис.9)
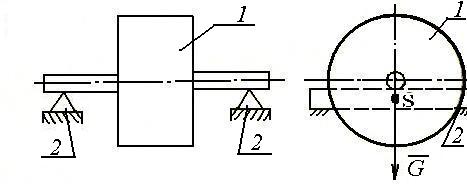



Рис.9. Схема установки для статической балансировки
Статическая неуравновешенность – несовпадение центра масс звена с осью вращения – может быть обнаружена простыми приспособлениями при нахождении звена в покое. Если положить статически неуравновешенное звено (ротор) своей осью вращения на горизонтальные призмы (рис.9),то звено будет перекатываться на призмах до тех пор, пока центр масс звена не займет нижнее положение, т.е. будет расположен внизу на вертикали, проходящей через ось вращения. Располагая уравновешивающую массу по этой же вертикали вверху (для этого можно применить , например, пластилин или другую какую-либо мастику), при помощи ряда попыток устанавливают величину этой массы. Попытки проводятся до тех пор, пока звено не будет занимать положение безразличного равновесия. Затем уравновешивающие масс (противовесы) из металла или других материалов, масса которых равна массе пластилина, крепят на роторе на определенном при балансировке радиусе. Часто вместо установки противовесов с противоположной стороны удаляют часть металла звена ( высверливают отверстие).
Существуют и более сложные приборы для статического уравновешивания, у которых масса необходимого противовеса (и место его установки) определяется по показанию специального прибора.
Динамическая неуравновешенность не может быть установлена при нахождении звена в покое, так как силы инерции и их моменты возникают только при вращении звена. Поэтому динамическая балансировка производится на специальных балансировочных машинах или станках, на которых звену сообщают вращательное движение.
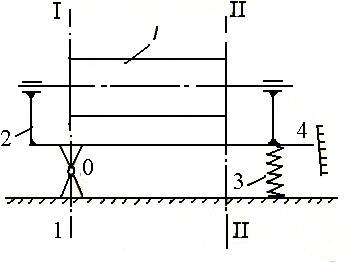
Рис.10. Схема динамической балансировки
Принципиальная схема машины для динамической балансировки представлена на рис.10. Балансируемому звену 1, которое устанавливается в подшипниках на раме 2, сообщается достаточно быстрое вращательное движение, в результате чего, если звено не уравновешено, возникают силы инерции. Эти силы воздействую на раму, которая соединена шарниром О и пружиной 3 с неподвижной станиной, и вызывают её колебание относительно шарнира. Максимальная амплитуда колебания, зависящая от величины дисбаланса, наступит тогда, когда наступит явление резонанса, т.е. когда период вынужденных колебаний, зависящий от числа оборотов звена, совпадает с периодом собственных колебаний системы. Эта амплитуда регистрируется самописцем 4.
Запись амплитуды колебаний рамы ведется при двух различных положениях звена на раме. После выбора плоскостей размещения противовесов (плоскости и ) звено устанавливается на раме сначала так, чтобы плоскость проходила через шарнир О. Затем опыт повторяется при повороте звена, когда плоскость проходит через шарнир О. После записи амплитуд колебания определяют величины противовесов и направления, на которых их следует установить в плоскостях и . При этом одновременно производится и статическая и динамическая балансировки.