

4.2 Источники погрешности цифровых измерительных приборов
Погрешности цифровых измерительных приборов можно разделить на статические, динамические и дополнительные.
Статическая основная погрешность цифрового измерительного прибора складывается из следующих составляющих:
погрешности квантования;
погрешности реализации уровней квантования Δxр, возникающих из-за того, что измеряемая величина квантуется в соответствии с реальными значениями уровней, а отсчет производятся в соответствии с принятыми значениями (номерами);
погрешности от наличия порога чувствительности Δxч сравнивающего устройства, возникающей при сравнении неизвестной величины с известной;
погрешности Δxп от действия помех на прибор;
погрешности дискретизации Δtд, возникающие при дискретизации (квантовании) временного интервала.
Погрешности квантования были рассмотрены ранее (см. п. 4.1). Погрешность Δxр реализации уровней квантования обуславливается смещением уровней квантования. Так как смещение уровней может иметь систематическую и случайную составляющие, то погрешность Δxр также может иметь систематическую и случайную составляющие.
Погрешность порога чувствительности Δxч вносится устройствами, сравнивающими измеряемую величину с квантованной. Значение Δxч определяется порогом срабатывания сравнивающего устройства.
Погрешность дискретизации Δtд в цифровых измерительных приборах можно рассмотреть на примере измерения временного интервала исследуемого сигнала (рис. 4.9). Временной интервал Тх измеряется путем счета дискретизирующих (тактовых) импульсов стабильной частоты fт=1/Δt, поданных на вход счетчика за время Тх.
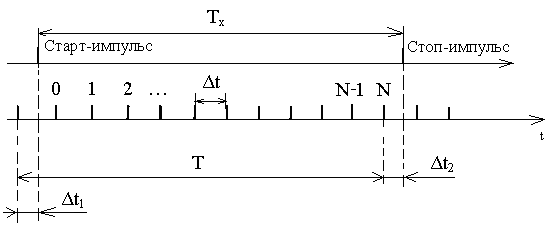
Рис. 4.9
В общем случае время Тх не кратно периоду следования тактовых импульсов Δt. Поэтому при измерении временного интервала возникает погрешность Δtд = Т - Тх, где Т=NΔt (N – число импульсов зарегистрированных счетчиком импульсов). В соответствии с рис. 4.9 эта погрешность состоит из двух составляющих: Δt1 и Δt2.
Первую погрешность Δt1 называют погрешностью от случайного расположения начала шкалы (погрешность синхронизации). Она находится в пределах от 0 – Δt и имеет равномерный дифференциальный закон распределения. Вторая составляющая Δt2 – погрешность, вызванная случайным расположением стоп – импульса относительно тактовых импульсов. Закон распределения этой погрешности также равномерный дифференциальный от – Δt до 0.
Предельная погрешность составит Δtпд = ±Δt. Относительная предельная погрешность дискретизации имеет вид
![]() .
.
Среднеквадратическое отклонение и математическое ожидание (систематическая составляющая) результирующей погрешности соответственно равны:
![]() ;
;
![]() .
.
Динамические свойства цифровых измерительных приборов и входная измеряемая величина определяют динамические погрешности цифровых измерительных приборов. Различают динамические погрешности первого и второго рода. Динамические погрешности первого рода обусловлены инерционностью элементов измерительной части.
Динамическая погрешность второго рода в цифровом измерительном приборе циклического действия возникает из-за того, что измерение производится в один момент времени, а результат измерения приписывают другому моменту времени. Возникновение динамической погрешности второго рода показано на рис. 4.10. В данном случае измерение производится в момент времени t2 (рис. 4.10), а результат измерения приписывается либо началу цикла преобразования t1
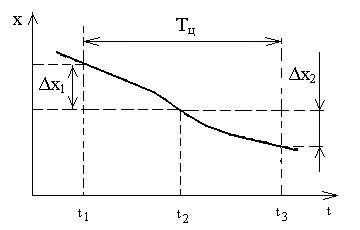
Рис. 4.10
либо концу цикла преобразования t3. Это приводит к погрешности Δx1 или Δx2 соответственно. Максимальная приведенная динамическая погрешность второго рода определяется выражением:
![]() ,
,
где
Δx
– максимальное изменение измеряемой
величины за цикл Тц,
–
максимальное значение измеряемой
величины,
![]() – скорость изменения измеряемой
величины. При синусоидальном изменении
измеряемой величины с частотой f0
максимальная динамическая погрешность
второго рода определяется как γ =
2π·f0·Тц.
– скорость изменения измеряемой
величины. При синусоидальном изменении
измеряемой величины с частотой f0
максимальная динамическая погрешность
второго рода определяется как γ =
2π·f0·Тц.