Стандартный морской разговорник имо. Пользование английским языком в различных видах профессиональной деятельности.
Стандартный морской разговорник ИМО предназначен для связи по вопросам обеспечения безопасности плавания и оказания помощи на море между судами различной национальности, а также судами и берегом и между судами, когда отсутствует общий язык и в случаях возникновения языковых трудностей
Влияние внешних факторов на управляемость и маневренность судна.
На надводную часть
судна действует кажущийся ветер, который
является суммой истинного Wи
и курсового
ветра

 .
Надводная и подводная часть корпуса
рассматривается 2-мя свойствами:
.
Надводная и подводная часть корпуса
рассматривается 2-мя свойствами:
Равнодействующая всех сил, всегда смещается к передней кромке крыла по направлению движения.
Направление равнодействующей сил стремится к нормали поверхности.
Судоводитель всегда измеряет кажущийся ветер на движущемся судне. Он характеризуется величиной курсового угла qw и скоростью W. Величина аэродинамической силы действующей на судно рассчитывается:
 ,
,
где Са — коэффициент аэродинамичности
рв - плотность ветра
Sн - площадь проекции подводной части на ДП
W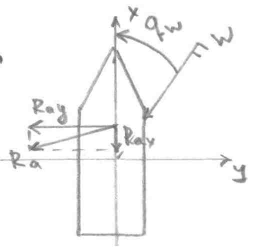 - скорость кажущегося ветра.
- скорость кажущегося ветра.
Плечо аэродинамической силы в безразмерном виде можно рассчитывать
lо - смещение центра боковой парусности относительно ДП
Разложим Ra на Rax и Ray.
П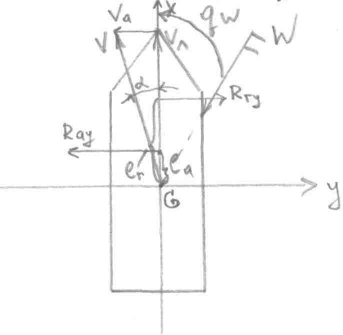 родольная
составляющая Rax вызывает изменение
cопротивления,
а сила Ray
- боковое смещение. Под действием Ray
на корпусе судна возникает ветровой
дрейф с утлом
родольная
составляющая Rax вызывает изменение
cопротивления,
а сила Ray
- боковое смещение. Под действием Ray
на корпусе судна возникает ветровой
дрейф с утлом
При движении корпуса судна с углом дрейфа на подводной его части возникает
гидродинамическая
сила:
 ,
,
где Cr - безразмерная сила гидродинамической силы
Р - плотность воды
Sn - площадь проекции подводной части корпуса по ДП
V - скорость судна.
Эта сила направлена в сторону противоположную Ra, а её плечо:
 ,
,
 - угол дрейфа
- угол дрейфа
Поскольку моменты аэро и гидро сил направлены в противоположные стороны, то для удержания судна на курсе момент от силы на руле должен быть больше разности Мр>Ма - Mr. По этой причине при носовых курсовых углах судно управляется хорошо.
Управляемость судна при кормовых углах ветра.
При кормовых курсовых углах ветра, точка приложения аэродинамической силы смещается в сторону кормы.
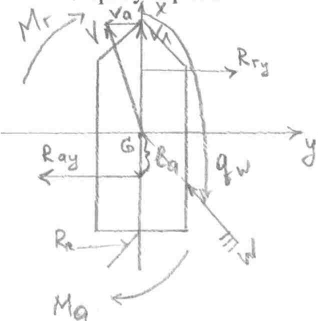 При
появлении угла ветрового дрейфа по
надводной части корпуса судна возникает
поперечная гидродинамическая сила Rry
- которая направлена в сторону
противоположную Ray,
но смещается в сторону носа от миделя.
В этом случае знаки Ма и Мг совпадают.
Для удержания судна на курсе необходимо
переложить руль, момент которого должен
скомпенсировать сумму Мр>Ма + Mr,
по этой причине судно на кормовых
курсовых углах ветра управляется плохо.
При
появлении угла ветрового дрейфа по
надводной части корпуса судна возникает
поперечная гидродинамическая сила Rry
- которая направлена в сторону
противоположную Ray,
но смещается в сторону носа от миделя.
В этом случае знаки Ма и Мг совпадают.
Для удержания судна на курсе необходимо
переложить руль, момент которого должен
скомпенсировать сумму Мр>Ма + Mr,
по этой причине судно на кормовых
курсовых углах ветра управляется плохо.
Потеря управляемости.
При движении постоянным курсом, при отсутствии ветра, судно удерживается на курсе перекладками руля Sтв, вокруг ДП судна Sтв=2 - 3
При движении в условиях ветра, руль приходится перекладывать на некоторый постоянный угол Sкомпенс, который компенсирует действия внешней силы манипулировать рулём этого положения на угол Sв=10-15.

Руль как средство управления, эффективен до углов перекладки руля 35
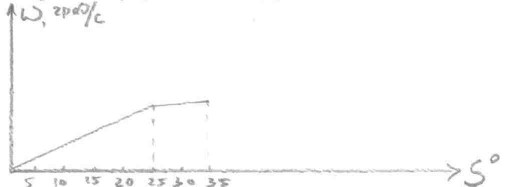
Условие потери
управляемости можно записать двумя
способами либо другим способом записи
является равенство: .
.
Момент на руле больше либо равняется сумме аэро и гидродинамической сил. Если перед потерей управляемости судно приводится к ветру, то говорят, что наступает потеря управляемости первого рода. Если же при потере управляемости судно уваливается под ветер, то говорят, что наступает потеря управляемости второго рода.

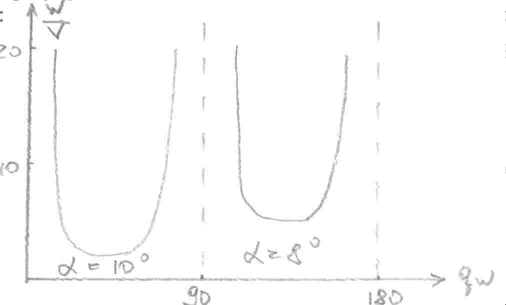
Для оценки потери управляемости для каждого судна можно построить диаграмму потери управляемости: