

Гирокомпасы типа «Курс» и «Вега»
Со второй половины 70-х годов на суда начали устанавливать двух-режимные одногироскопные гирокомпасы с электромагнитным управлением типа «Вега». По сравнению с ГК «Курс-4» «Вега» имеет небольшие габариты, два режима работы, в нём используется астатический гироскоп, схема коррекции, исключающая скоростную и широтную погрешности ЧЭ, жидкостно-торсионный подвес, дающий возможность налагать на ЧЭ управляющие и корректирующие моменты. Отсутствует система принудительного охлаждения.
Принцип действия гироазимуткомпаса «Beга». Гироазимуткомпас (ГАК) «Вега» является двухрежимным гироскопическим курсоуказателем, обеспечивающим в режиме гирокомпаса (ГК) определение курса относительно географического меридиана, а в режиме гироазимута (ГА) - угла отклонения от заданного направления.
Чувствительным элементом «Веги» является одногироскопная гиросфера, которая с помощью горизонтальных и вертикальных торсионов, перпендикулярных главной оси гиросферы, подвешена в корпусе трехстепенного поплавкового гироблока ТПГ-6. Гироблок заполнен поддерживающей жидкостью с плотностью около 2 г/см3, в которой гиросфсра находится в состоянии нейтральной плавучести. Центр масс гиросферы совпадает с ее геометрическим центром, т. е. гиросфера не имеет маятниковости.
Одним из основных элементов схемы управления является индикатор горизонта (ИГ) - небольшой физический маятник с индукционным съемом сигнала, задемпфированный вязкой жидкостью.
При отключении сигнала индикатора горизонта (ИГ) от входа усилителя горизонтной следящей системы «Вега» работает в режиме гироазимута (гироскопа направления). В этом режиме прибор не имеет компасных свойств, гиросфера лишь сохраняет в течение некоторого времени приданное ей азимутальное направление, постепенно отклоняясь от него под действием нескомпенсированных вредных моментов и из-за ошибок системы коррекции. Этот режим, преимуществом которого является практически полное отсутствие влияния инерционных сил, применяется в основном в высоких широтах и при большой скорости движения судна при маневрировании, а также при периодических проверках и регулировке прибора.
Погрешность дистанционной передачи курса ±0,1°. Время ускоренного приведения в известный меридиан не более 30 мин, время прихода в меридиан без ускоренного приведения не более 6 ч. В прибор необходимо вводить информацию о широте (вручную) и о скорости (автоматически или вручную). «Вега» сопрягается с лагом ИЭЛ-2М, имеющим трансляционный прибор 119А или 119Э с датчиком типа ЛВТ-5 или иным датчиком, запитываемым от ГАК и вырабатывающим сигнал скорости крутизной около 0,2 В/уз.
Рекомендации по эксплуатации. Наиболее достоверную оценку исправности ГАК дает регулярная проверка поправки в режиме ГК, которую определяют по разности между истинными и компасными пеленгами береговых ориентиров (створов) или небесных светил (чаще всего—Солнца). Средняя погрешность определения поправки по створам ±0,5°, по небесным светилам ±0,7°.
Светила рекомендуется пеленговать в моменты, когда их высота не превышает 30°. При пеленговании необходимо особо тщательно горизонтировать пеленгатор по его штатному уровню. Для расчета истинного пеленга (азимута) светил гринвичское время момента пеленгования необходимо фиксировать с погрешностью ±5 с. На стоянке поправку рекомендуется определять перед выходом в море, а во время рейса — ежедневно при движении судна прямым курсом с постоянной скоростью (не ранее чем через 2 ч после маневра). Не разрешается устранять поправку разворотом корпуса прибора ВГ-1А или с помощью рукоятки «ПОПР» во избежание нарушения регулировки прибора.
Состав гирокомпаса КУРС.
Основные конструктивные элементы.
Основной частью гирокомпаса является чувствительный элемент, неподвижный относительно меридиана.
По конструкции чувствительного элемента все современные гирокомпасы делятся на одно- и двухроторные.
Появление двухроторных гирокомпасов было вызвано необходимостью устранения вредного влияния качки на гирокомпас. При помощи двух особым образом подвешенных гироскопов обеспечивается указанная выше стабилизация чувствительного элемента в горизонтальной плоскости.
Превращение свободного гироскопа в гирокомпас осуществляется для однороторных гирокомпасов преимущественно посредством жидкостного маятника; для двухроторных гирокомпасов посредством твердого маятника.
Затухание колебаний однороторных гирокомпасов осуществляется либо при помощи твердого маятника (типа «Сперри»), либо гидравлического успокоителя (типа «Браун»). В конструкциях двухроторных гирокомпасов применяется преимущественно гидравлический успокоитель.
Необходимой частью гирокомпаса является следящая система, которая предназначена для устранения вредных моментов сил трения в подвесе чувствительного элемента, а также используется для дистанционной передачи показании основного прибора гирокомпаса.
Современные однороторные гирокомпасы с торсионным (проволочным или ленточным) подвесом чувствительного элемента, как правило, имеют индукционную следящую систему, а двухроторные компасы с жидкостным подвесом чувствительного элемента - мостового типа на сопротивлениях.
Гиромоторы современных гирокомпасов обычно представляют собой асинхронные трехфазные электродвигатели с короткозамкнутой обмоткой ротора. Обороты гиромотора колеблются от 6000 до 30 000 об/мин в зависимости от конструкции гирокомпаса. Встречаются также однофазные гиромоторы индукционного типа (гирокомпас Арма).
Дистанционная передача показаний основного компаса на принимающие в современных конструкциях гирокомпасов осуществляется на переменном токе и представляет собой индукционную самосинхронизирующуюся систему.
В соответствии с типом гиромотора и синхронно-следящей системы гирокомпасы имеют различные источники питания. Обычно это многомашинные агрегаты, двигатель которых питается от судовой сети постоянного или переменного тока.
Краткое описание двухроторного гирокомпаса типа «Курс-4».
Суда морского флота России оборудованы за небольшим исключением двухроторными гирокомпасами типа «Курс».
На судах с бортовой сетью постоянного тока напряжением 110 в или 220 в устанавливаются гирокомпасы типа «Курс-3». На судах с бортовой сетью переменного тока напряжением 220 в или 380 в и частотой 50 гц устанавливаются гирокомпасы типа «Курс-4».
Гирокомпасы «Курс-3» и «Курс-4» отличаются друг от друга агрегатами питания и незначительными конструктивными особенностями.
Гирокомпас типа «Курс» состоит из основного прибора, агрегата питания, приборов управления и контроля, системы охлаждения, принимающих приборов.
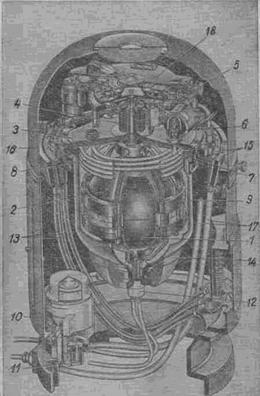
Рис. 4. Основной прибор гирокомпаса типа «Курс»: 1 — чувствительный элемент; 2 — следящая сфера; 3 — стол; 4 — коллектор; 5 — щеткодержатель со щетками; 6 — замыкатель ревуна; 7—термореле; 8 — змеевик охлаждения; 9— резервуар, 10— нактоуз, 11 — помпа ускоренного приведения в меридиан; 12 — подвижный штуцер; 13 — кабели питания прибора, 14 — балансировочный груз; 15 — карданные кольца, 16—колпак; 17—шланги охлаждения, 18—корректор (механизм 9).