

Подбор звезд для определения места. Нанесение на звездный глобус положения планет и Луны.
Н анесение
на глобус планет, Луны и Солнца.
анесение
на глобус планет, Луны и Солнца.
Поскольку навигационные планеты ввиду их собственного движения на глобусе не обозначены, приходится наносить их перед предполагаемыми наблюдениями на поверхность глобуса. Венеру рекомендуется наносить один раз в неделю, Марс — раз в две недели, Юпитер и Сатурн — один раз в месяц.
Порядок нанесения планет таков:
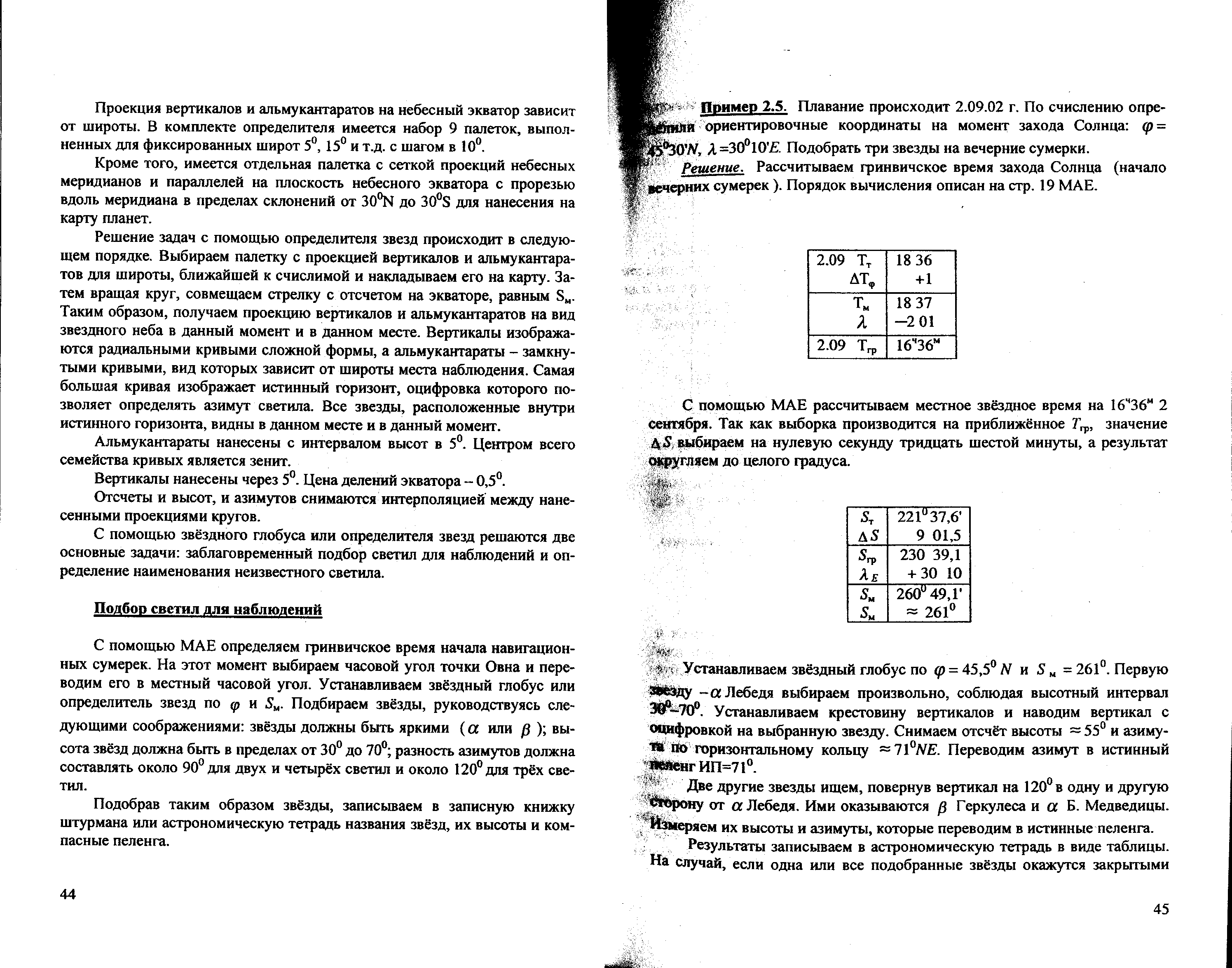
1. Выбирают из МАЕ значения a и d планеты. 2. Поворачивают сферу глобуса, подводя к оцифрованному краю меридиана наблюдателя отсчет экватора, равный a планеты. 3. Откладывают по дуге меридиана наблюдателя величину d в сторону северного или южного полюсов мира в зависимости от наименований склонения. 4. Отмечают положение планеты точкой специальным восковым или обычным мягким карандашом и ставят рядом астрономический знак данного светила. 5. Контроль: нанесенные планеты должны располагаться недалеко от эклиптики.
Для нанесения Луны надо предварительно рассчитать ее прямое восхождение, так как оно в МАЕ не приводится. Порядок работы здесь таков: 1. Выбирают из МАЕ на ближайший целый час наблюдений Тгр величины tgм и t)гр [знак ) здесь обозначает луну]. 2. Рассчитывают a) = tgгр - t)гр .
3. Наносят Луну на поверхность глобуса так же, как и планеты.
Задача нанесения Луны на практике применяется сравнительно редко.
Солнце в принципе можно наносить так же, как и Луну, его a и d допустимо выбирать на середину суток Тгр = 12ч. Для контроля следует помнить, что Солнце всегда должно располагаться на эклиптике.
Вообще можно прямо наносить Солнце на эклиптику, определив приближенно Lө.
Пример. 31 августа 1976 года. Тс = 18ч45м, lc = 13° 07,0' Ost. Нанести на звездный глобус Марс и Луну.
Решение.
31/VII. Tc - №Ost = 18ч45м - 1 = Tгр = 17ч45м.
Тгр = tgгр = 250º02,2'; tgгр - t)гр = 250º02,2' - 8º20,8' = a) = 241º41,4' ≈ 241,5º.
a♂ = 18º26,4'; d♂ = 1,4ºS (на Тгр = 18ч).
Марс расположен вблизи эклиптики в районе созвездия Девы. Луна — в районе созвездия Скорпиона.
Ходкость и инерционные свойства судов в речных условиях.
Ходкостью судна называется его способность перемещаться с заданной скоростью при затрате определенной мощности главных двигателей.
При движении судна на него сразу же начинают действовать силы сопротивления воды и воздуха, направленные в сторону, противоположную его движению, преодолеваемые упорным давлением движителя. Изучение вопросов, связанных с закономерностью этих сопротивлений, дает возможность выбора наиболее рациональных обводов судна, обеспечивающих достижение скорости при минимальной затрате мощности двигателей. Сопротивления движению судна возрастают при увеличении его скорости и равны сумме отдельных сопротивлений. Сопротивление воды слагается из:
а) сопротивления формы или вихревого сопротивления Rф, зависящего от формы погруженной части корпуса и создающихся за кормой вихревых образований воды, которые, отрываясь от судна, уносят с собой приобретенную ими живую силу вращательного движения. Чем полнее корпус судна и хуже его обтекаемость, тем больше вихрей и значительнее сопротивление;
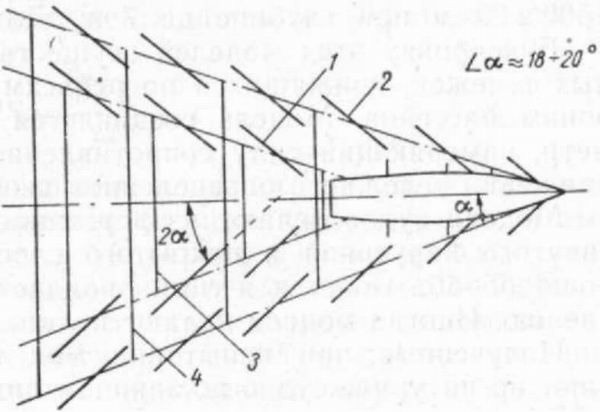 Рис.
26. Система волн, возникающих при движении
судна. 1, 2 — расходящиеся кормовые и
носовые соответственно; 3, 4 — поперечные
носовые и кормовые соответственно.
Рис.
26. Система волн, возникающих при движении
судна. 1, 2 — расходящиеся кормовые и
носовые соответственно; 3, 4 — поперечные
носовые и кормовые соответственно.
б) сопротивления трения Rт, которое зависит от скорости судна и величины поверхности погруженной в воду части корпуса. Сопротивление трения возникает оттого, что частички воды, соприкасающиеся с погруженной поверхностью корпуса, прилипают к ней и приобретают скорость судна. Соседние слои воды также начинают двигаться, но по мере удаления от поверхности корпуса скорость их постепенно снижается и пропадает совсем. Таким образом, на поверхности погруженной части корпуса образуется так называемый пограничный слой, в поперечном сечении которого скорость воды неодинакова. Экспериментальным путем получены формулы, с помощью которых определяется трение судовой поверхности.
Инерцию обычно принято оценивать длинами тормозного пути, свободного выбега и пути разгона, а также их продолжительностью по времени.
Расстояние, которое проходит судно за промежуток времени от момента переключения машин с полного хода вперед на полный задний ход до момента окончательной остановки судна называется тормозным путем. Это расстояние обычно выражается в длинах судна.
Расстояние, которое проходит судно за промежуток времени от момента остановки машин, работающих на передний ход, до полной остановки судна за счет сопротивления воды, называется свободным выбегом.
Расстояние, которое проходит судно с момента включения машин на передний ход до момента приобретения полной скорости при заданном режиме работы машин, называется путем разгона.
В критических случаях для погашения инерции, кроме использования работы двигателей, прибегают к отдаче якорей, а на несамоходных судах и плотах — также и к отдаче лотов и цепей.