

2. Способ траверзных расстояний (рис. 21.2).
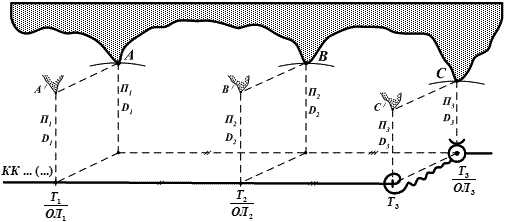
Рис. 21.2. Способ траверзных расстояний
Наблюдатель
измеряет расстояния до береговых
ориентиров, эхо-сигналы которых видны
на экране, когда они приходят на один и
тот же курсовой угол, лучше всего на
траверз, и в момент измерения расстояний
замечает время и отсчет лага
.
Затем на листе кальки прокладывает
линию курса со счислимыми точками
каждого измерения ![]() .
Из соответствующих точек по КУ и D наносит
объекты (А′,
В′, С′).
Подготовленную таким образом кальку
накладывает на путевую навигационную
карту и перемещает ее так, как и при
первом способе. В результате совпадения
ориентиров на кальке и карте наблюдатель
получает уточненное положение линии
пути и места судна.
.
Из соответствующих точек по КУ и D наносит
объекты (А′,
В′, С′).
Подготовленную таким образом кальку
накладывает на путевую навигационную
карту и перемещает ее так, как и при
первом способе. В результате совпадения
ориентиров на кальке и карте наблюдатель
получает уточненное положение линии
пути и места судна.
21.3.2. Определение места судна по расстояниям до нескольких ориентиров
1. Расстояния измеряются до точечных ориентиров (рис. 21.3).

Рис. 21.3. Определение места судна по расстояниям до нескольких точечных ориентиров
Наблюдатель последовательно измеряет расстояния до нескольких ориентиров (А, В, С) с помощью подвижного кольца дальности (ПКД) РЛС (ПКД совмещают с той частью изображения, которая больше всего выступает в сторону судна).
Вначале измеряют DР до ориентиров близких к траверзу судна; в последнюю очередь – до находящихся на острых или тупых курсовых углах (ор. С).
Если скорость хода судна более 12 узлов, измерения следует приводить к одному месту (последнему замеру DР). По исправленным значениям расстояний (D = DР + ΔDР) определяем на путевой навигационной карте обсервованное место судна, как точку пересечения дуг окружностей, проведенных от мест ориентиров, радиусами R = D (DA, DB, DC).
2. Расстояния измеряются до участка береговой черты с плавными очертаниями и «точечного» ориентира (рис. 21.4).
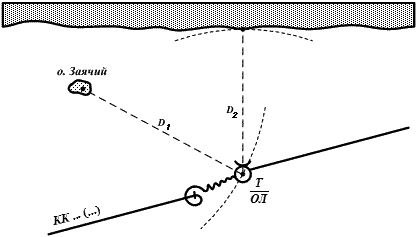
Рис. 21.4. Определение места судна по расстояниям до ориентиров
От точечного ориентира радиусом, равным измеренному и исправленному расстоянию до него проводят дугу окружности и на ней ищут место, откуда дуга, проведенная радиусом, соответствующим второму измеренному и исправленному расстоянию, касалась бы плавной береговой черты.
Положение острия циркуля будет соответствовать обсервованному месту судна.
3. Расстояния измеряются до участков береговой черты с плавными очертаниями (рис. 21.5).
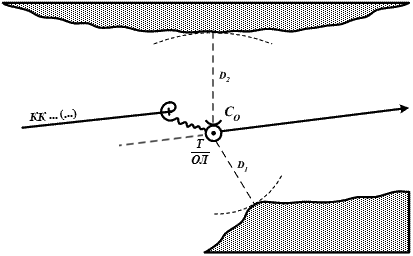
Рис. 21.5. Определение места судна по расстояниям
В этом случае нужно измерять расстояния DP1 и DP2 до ближайших к судну точек береговой черты.
Затем на кальку наносят линию курса судна и из какой-либо точки этой линии (т. С0) проводят дуги окружностей радиусами, равными измеренным и исправленным расстояниям D1 = DP1 + ΔDP и D2 = DP2 + ΔDP.
Дуги проводят примерно в районе тех курсовых углов (КУ), на которых были измерены эти расстояния. Кальку накладывают на карту так, чтобы общий центр дуг находился примерно в районе счислимого места. Передвигая кальку по путевой навигационной карте, находят такое ее положение, при котором дуги коснутся обоих участков берега (рис. 21.5).
Положение центра дуг в этот момент и определит обсервованное место судна.
Если участки береговой черты параллельны, место судна определить таким образом нельзя.
Если при измерении DP1 и DP2 измерялись и РЛП1, РЛП2, можно обойтись и без кальки.