

49. Определение места по звездам и планетам. Оценка точности.
Одновременными условно называют наблюдения двух и более светил, выполняемые в быстрой последовательности. Такие наблюдения обычны для сумерек при определениях по звездам и (или) планетам, а в периоды квадратур возможны определения по одновременным наблюдениям Солнца и Луны. Общим для всех таких определений места является то, что перемещение судна за время между измерениями высот учитывается приведением их к одному месту (зениту). Различаются такие определения по числу наблюдаемых светил, от чего зависит наивыгоднейшая разность их азимутов, выбор места относительно, фигуры погрешностей и оценка точности результатов.
Порядок действий при определении места по одновременным наблюдениям светил:
- подобрать светила с наивыгоднейшей разностью азимутов — 50—70° для двух светил, примерно по 120° для трех и по 90° для четырех светил;
- измерить в быстрой последовательности высоты светил (желательно по 3—5 раз каждого), замечая моменты по хронометру;
- заметить судовое время Тс и отсчет лага, снять с карты счислимые координаты судна φс и λс на этот момент, записать курс ИК, и скорость V;
- определить поправку индекса секстана (можно до наблюдений) и если позволяют условия, измерить наклонение горизонта;
- если измерения выполнялись сериями, то найти средние из моментов по хронометру и отсчетов секстана для каждого светила;
- найти приближенное время и дату на Гринвиче по Тс и номеру часового пояса, рассчитать точные моменты Тгр по хронометру и его поправке для каждого измерения высоты пли среднего из серии;
- определить координаты светил tгр и δ на дату и моменты Тгр;
- решить параллактические треугольники и перевести азимут А в круговой счет:
- исправить высоты светил и привести их к одному месту (зениту), которому соответствуют Тс и ОЛ;
- рассчитать переносы h0 — hс, проложить линии положения, найти обсервованное место и невязку;
- оценить точность полученной обсервации.
Прокладка всех линий положения выполняется одинаково: через счислимую точку про водят линию азимута, отмечая стрелкой направление на светило; вдоль этой линии откладывают перенос h0 — hс в сторону светила (если он положителен) или в противоположную (если он отрицателен); через полученную определяющую точку проводят перпендикулярно линии азимута высотную линию положения (ВЛП). Прокладку лучше всего выполнять на карте, на которой ведут счисление, и в том же масштабе. При прокладке на бумаге произвольную точку принимают счислимой, от нее откладывают по линиям азимутов переносы в одинаковом масштабе и в том же масштабе измеряют разность широт Δφ и отшествие Δω между счислимой и обсервованной точками, а также величину невязки С между ними. Величину Δω переводят в разность долгот Δλ = Δω*secφс (табл. 25-а МТ—75) и вычисляют обсервованные координаты:
φ0 = φс + Δφ
λ0 = λс + Δλ
В широтах до 70° часто пользуются угловым масштабом: строят угол, равный счислимой широте, вдоль его наклонной шкалы выбирают масштаб расстояний, по которому измеряют h0 — hс, Δφ и С, а проекция этой шкалы на горизонтальную сторону угла дает шкалу измерения Δλ.
При определениях по двум светилам обсервованное место принимают в точке пересечения их линий положения. Средняя квадратическая погрешность места М зависит от разности азимутов ΔА = А2 — А светил по формуле Каврайского:
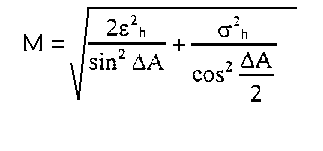
где εh и σh — средние квадратические значения случайных и повторяющихся погрешностей высот.
Круг радиуса .V/c центром в обсервованной точке содержит действительное, место с вероятностью 63—68%. Если радиус этого круга увеличить вдвое, то вероятность захвата им действительного места возрастает примерно до 95%.